マルチプロトコル対応ARM®プロセッサとSDKで開発期間を短縮:産業用ネットワークに浸透するEtherCAT
産業機器をつなぐネットワークに「Ethernet」化の波が押し寄せている。現在では、製造装置やプログラマブル・コントローラ(PLC)、HMI(Human Machine Interface)機器、モーター制御機器だけでなく、センサやアクチュエータといったフィールド機器の接続にもEthernetの適用が進んでいるのだ(図1)。
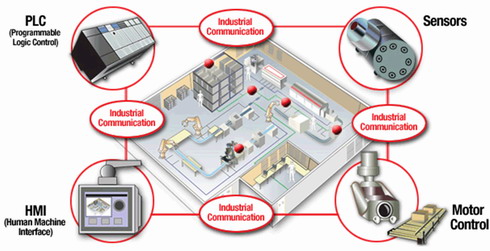 図1 FA市場に浸透する産業用ネットワーク
図1 FA市場に浸透する産業用ネットワークファクトリ・オートメーション(FA)を構成するプログラマブル・コントローラ(PLC)やHMI機器、センサ、モーター制御機器などの間で情報をやりとりするために、「Ethernet」を利用した産業用ネットワークの適用が進んでいる。
理由は2つある。1つは、産業機器用ネットワーク(フィールドバス)の配線数が大幅に増えたこと。このため、1種類の標準的なネットワークに集約させ、簡略化を目指す動きが活発化した。もう1つの理由は、伝送するデータ量の増加である。そこで、高速なデータ伝送が可能なEthernetの導入が進んだ。
ただし、Ethernetベースの産業機器用ネットワークは複数の仕様がある。例えば、「PROFINET」、「EtherCAT」、「EtherNet/IP」、「Powerlink」、「CC-Link」、「MECHATROLINK」などである。しかも、それぞれの仕様には相互接続性が確保されていない。
マルチプロトコル化で対応
複数存在するEthernetベースの産業機器用ネットワークの仕様は現時点では、いずれも多くのユーザーを抱えており、群雄割拠の状態にある。
ここで問題になるのが半導体メーカーの対応だ。ネットワークで接続する電子機器には、データ伝送を担うEthernetチップが不可欠である。市場において1つの仕様が支配的であれば、それに対応したチップを投入すればいい。しかし、現時点では、どの仕様が有力なのか判断が難しい。だからといって、それぞれの仕様に対応したチップを個別に用意するわけにはいかない。開発や製造のコストが膨大になってしまうからだ。
そこで一部の半導体メーカーでは、1つのEthernetチップで複数の仕様に対応する「マルチプロトコル」化に取り組んでいる。その代表的なメーカーがテキサス・インスツルメンツ(TI)である。製品化しているチップは「AM335x」である。ARM®の「Cortex-A8」を搭載したプロセッサで、同社の「Sitara™」シリーズに含まれる(図2)。
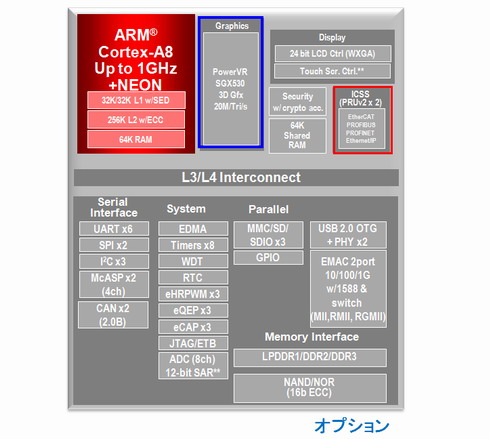 図2 複数の産業用ネットワーク仕様に対応したプロセッサ
図2 複数の産業用ネットワーク仕様に対応したプロセッサTIのプロセッサ「AM335x」の内部構成である。プロセッサ・コアにはARMの「Cortex-A8」を採用。複数の産業用ネットワーク仕様に対応するため、コプロセッサ「ICSS」を搭載した。
プロセッサの性能は極めて高い。動作周波数は最大1GHzにも達する。さらに、HMI機器などの搭載を想定し、オプションで3Dグラフィックス・アクセラレータの搭載も可能である。Ethernet仕様のマルチプロトコル化については、コプロセッサである「ICSS(Industrial Communication Subsystem)」が担当する。ICSSはそもそも、産業機器用Ethernetに求められる低遅延特性を実現するコプロセッサである。ソフトウェアIPを載せ替えることで複数のEthernet仕様に対応できる。現在、対応予定なのは、「EtherCAT」と「PROFIBUS DP」、「PROFINET」、「EtherNet/IP」、「Powerlink」である。さらに、サード・パーティ企業が提供するソフトウェアIPを利用すれば、「DeviceNet」と「CAN Open」にも対応可能だ。
対応するOSは、LinuxやμITRON、QNX、VxWorks、Androidなど。OSを使わない環境にも対応できる。
ソフト開発を容易にするSDKを用意
TIでは、リファレンス・デザインやソフトウェア開発環境(SDK)の整備を進めている。リファレンス・デザインとしては、「TMDSICE3359」を用意している(図3)。同社は、インダストリアル・コミュニケーション・エンジン(ICE)と呼ぶ。プロセッサには「AM3359」を採用。このほか、EthernetポートやPROFIBUS/CANのインターフェイスを搭載した。このボード1枚で、さまざまなプロトコルに対応した産業向けアプリケーションの開発を進められる。

ソフトウェア開発環境については、例えば、サード・パーティ企業であるJSLテクノロジーが提供する「JS-EtherCAT Professional SDK」がある(図4)。これはEtherCATに対応したスレーブ装置の開発に向けたものだ。特長は、「プロセッサに不慣れなエンジニアでも、スレーブ装置の開発を短期間に行える」(JSLテクノロジー株式会社 代表取締役 後藤勝紀氏)ことだ。
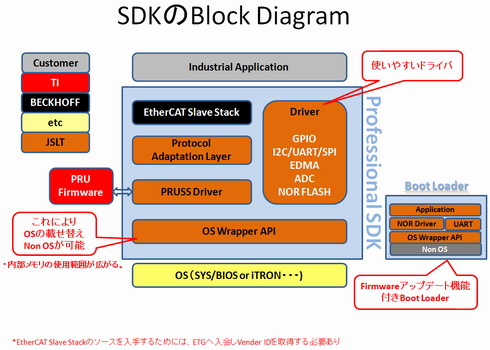 図4 EtherCATに対応したソフトウェア開発環境(SDK)
図4 EtherCATに対応したソフトウェア開発環境(SDK)ポイントは2つある。1つは、スレーブ装置に必要なドライバ・ソフトウェアなどをあらかじめ用意してある点だ。従って、電子機器メーカーは、アプリケーション・ソフトウェアだけを実装すればいい。もう1つは、「OS Wrapper API」という仕組みを用意したことである。これは、アプリケーション・ソフトウェアやドライバ・ソフトウェアなどとOSの間に入って両者を仲介するソフトウェアである。OSを変更する場合でも、アプリケーション・ソフトウェアやドライバ・ソフトウェアには一切手を加えず、OS Wrapper APIを調整するだけで対応可能だ。
開発期間を大幅に短縮
このソフトウェア開発環境は、2012年5月に提供を始めた。すでに、これを活用することで開発されたEtherCAT対応スレーブ機器の市場投入も始まっている。日立産機システムの「EH-IOCA」である(図5 水色電源部 右隣)。これは最大1408点ものI/Oの制御が可能なカプラ型EtherCATスレーブで、I/Oの点数が多い半導体製造装置などに最適である。同社のプログラマブル・コントローラ(PLC)「EHVシリーズ」の各種I/Oモジュールが適用できる。
 図5 EtherCATに対応したスレーブ装置
図5 EtherCATに対応したスレーブ装置日立産機システムの「EH-IOCA」である。TIのプロセッサ「AM335x」を搭載し、JSLテクノロジーのSDK「JS-EtherCAT Professional SDK」を使ってソフトウェアを開発した。
EH-IOCAの開発に着手したのは、2012年の夏である。「TIの紹介で、JS-EtherCAT Professional SDKの採用を決めた。新規採用のプロセッサを使用した製品開発には通常、基本設計から量産まで1年半以上かかることが大半だが、TIのSitaraシリーズARMにJS-EtherCAT Professional SDKを活用することで1年弱に短縮できた」という。(株式会社日立産機システム 営業統括本部 機器営業統括部 担当部長 鳫金憲一氏)
日立産機システムでは、EtherCAT搭載のACサーボシステムなども製品化しているが、今後の新製品にはマルチプロトコル対応のプロセッサの採用を積極的に検討していきたいと考えている。
※ SitaraはTexas Instrumentsの商標です。その他、全ての商標および登録商標はそれぞれの所有者に帰属します。
◎ TIの開発キット/開発ツールは、オンライン・ストア(TI eStore)から簡単に購入可能です。
Copyright © ITmedia, Inc. All Rights Reserved.
提供:日本テキサス・インスツルメンツ株式会社
アイティメディア営業企画/制作:MONOist 編集部/掲載内容有効期限:2013年10月29日
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。