全方向に連続移動できる円形断面型クローラーを開発:ロボット開発ニュース
NEDOと東北大学は、全方向に連続して移動できる円形断面型クローラーを開発した。従来の車輪では走行が難しい状況でも、クローラーの向きを変えることなく、縦、横、斜めにスムーズに移動できる。
NEDO(新エネルギー・産業技術総合開発機)と東北大学は2019年8月26日、全方向(360度方向)に連続して移動できる、円形断面型クローラー(履帯)を開発したと発表した。
今回開発されたクローラーは、歯車とチェーン、ベルトを用いることで、摩擦伝動によらない高い駆動力が伝達できるようになった。また、放射状に最密配置したクローラーにより、モーターの回転方向を切り替えずにスムーズに移動する。
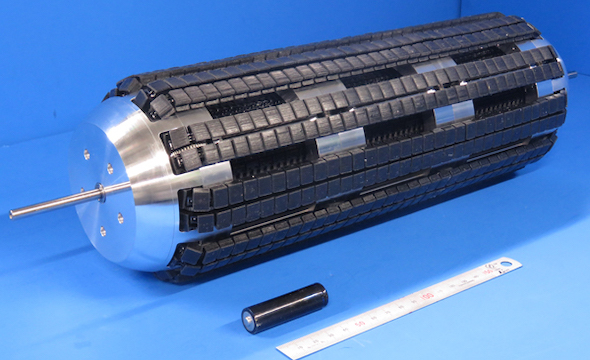
不整地の走破性に優れ、軸方向の段差は10mmの高さを乗り越え、その直交方向の段差は30mmを乗り越える。溝は140mmの長さを踏破可能だ。柔らかいじゅうたんや点字ブロックの段差、踏切内の線路の溝など、従来の車輪では走行が難しい状況でも、クローラーの向きを変えることなく、縦、横、斜めに移動できる。
新技術の核となったのは、新たに考案した全方向移動用のスクリュー式差動回転機構だ。ねじ歯車が回転軸の動力を垂直方向に変換する構造を線対称に配置することで、左右両側の入力回転を前後左右の移動につながる公転、自転の出力に変換する。
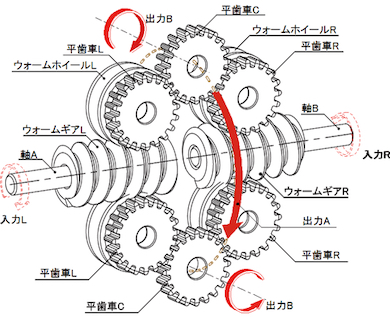
同クローラーは、全方向移動に必要な2つのモーターと平歯車やねじ歯車といった最小限の動力伝達装置からなる単純な構成であるため、保守性や小型化の面でもメリットを有する。
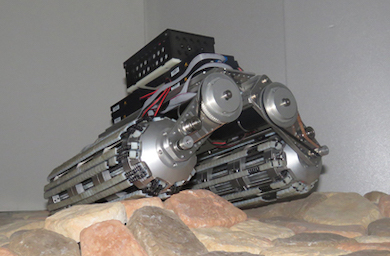
これまでに東北大学が開発した「オムニクローラー」は、斜め方向に移動する際、モーターの回転方向を切り替える必要があり、任意の方向へ連続的に移動するのは困難だった。新開発の円形断面型クローラーは、全方向への連続移動に加え、オムニクローラーの優れた耐荷重性や走破性を維持することから、電動車いすや移動型ナビゲーションロボット、巡回警備ロボットなど、重量の大きなモビリティー用駆動機構としての用途が期待される。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 レスキューロボット集結! 要救助者を速やかに助け出せ!
レスキューロボット集結! 要救助者を速やかに助け出せ!
2019年8月10日、11日に神戸サンボーホールにて「レスキューロボットコンテスト(以下、レスコン)」が開催された。今回で第19回目を迎える本コンテストには全国から24チームの応募があり、岡山と東京で開催された予選を経て14チームが本選に出場した。 ロボットの関節がしなやかになる「世界初」のギヤ、減速比100:1でも逆駆動可能
ロボットの関節がしなやかになる「世界初」のギヤ、減速比100:1でも逆駆動可能
NEDOと横浜国立大学は、従来不可能だった100:1を超えるような高い減速比の減速機でも逆駆動が可能となる「世界初」のギヤ「バイラテラル・ドライブ・ギヤ」を開発したと発表した。 世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決
世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決
NEDOと慶應義塾大学は、身体感覚を伝送可能な双腕型ロボット「General Purpose Arm」の開発に成功した。「世界初」とする力触覚に応じた制御により、力加減を調節し多様な作業を柔軟に行えることが最大の特徴。「固くて柔らかい」という矛盾した制御が必要な力触覚はどのように実現されたのか。 「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告
「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告
IEEE(米国電気電子学会)は「日本のロボット利用に関する現状と課題 〜福島第一原発における災害用ロボット活用事例から読み解く〜」と題したセミナーを開催。国産ロボット「Quince(クインス)」の福島第一原発における活動状況について、その詳細が語られた。そして、なぜ、国産ロボットが真っ先に投入されなかったのか、その理由が明らかに!? 「あの現場で動けるロボットはQuinceしかない」〜原発ロボットを開発する千葉工大・小柳副所長(前編)
「あの現場で動けるロボットはQuinceしかない」〜原発ロボットを開発する千葉工大・小柳副所長(前編)
震災から1年――。今なお予断を許さない東京電力・福島第一原子力発電所の事故。この過酷な現場に投入されたのが、千葉工業大学 未来ロボット技術研究センター(fuRo)が開発したレスキューロボット「原発対応版Quince(クインス)」だ。本稿では、開発責任者でfuRo副所長を務める小柳栄次氏に、これまでの開発について、そして今後のレスキューロボットについて話を聞いた。 立ち入り規制続く大涌谷にロボット投入、神奈川県が映像公開
立ち入り規制続く大涌谷にロボット投入、神奈川県が映像公開
神奈川県は現在も噴火による警戒地区に指定されている大涌谷(箱根山)に、火山活動ロボットを投入。その映像を公開した。