いまさら聞けない EtherCAT入門:産業用ネットワーク技術解説(4/4 ページ)
産業用オープンネットワーク「EtherCAT(イーサキャット)」をご存じだろうか。工場などの産業用オートメーションにおいて、フィールドネットワークのオープン化が進む中、なぜEtherCATの存在感が増しているのか。誕生背景やメカニズム、活用シーンなどを詳しく解説し、その秘密に迫る。
EtherCATの活用場面
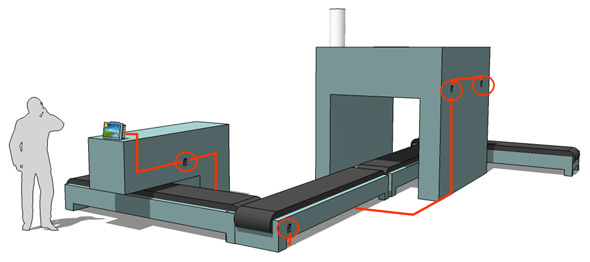
1つは、広大なフィールドと多くのセンサーが存在する工場などの生産ラインでの活用が考えられます。設置するスレーブはインテリジェント性が不要な分、安価で保守の手間も掛からず、生産ラインの要所へ潤沢に設置できるでしょう(図8)。
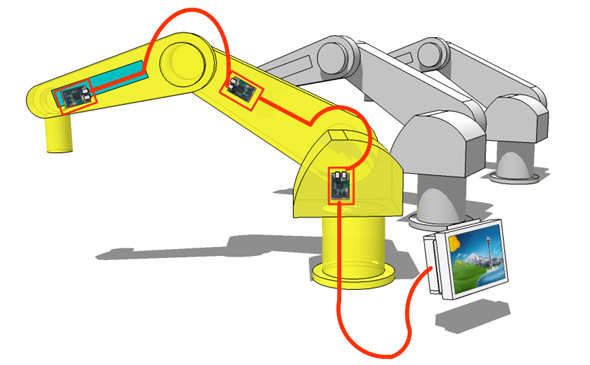
また、多関節ロボットなど可動部の多い機構では、EtherCATスレーブを点在させれば省配線と高応答性を両立できます(図9)。
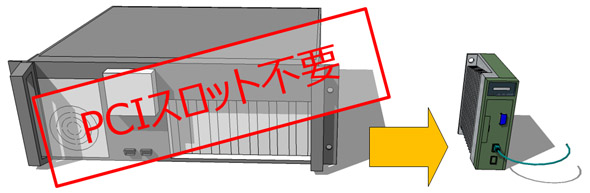
EtherCATの高速性と取り扱える信号点数の豊富さは、PC標準のI/O増設手段であるPCIバスの代替として十分といえるでしょう。従来、PCベースの制御では数多くのPCI拡張スロットを備えた工業用PCが求められてきましたが、EtherCATによってPCI拡張スロットは必須ではなくなりました。EtherCATであれば、筐体をコンパクト化しながらも高い拡張性を実現することが可能です(図10)。
その他のテクノロジー
プロセスデータの並び順と、EtherCATスレーブの物理的な接続順は無関係で、問いません。制御対象の構造的特性に合わせて、自由な順でEtherCATスレーブを構成できます。EtherCATでは、理論上最大6万5536スレーブが接続可能です。EtherCATのネットワークトポロジーは、ライン型接続になることが基本ですが、スター型、ディジーチェーン、リングなど柔軟に対応できます。
EtherCATが高速とはいえ、スレーブとスレーブの間で起こる極わずかなn(ナノ)秒、μ秒単位の“伝送時間差”は、高速サンプリングシステムの場合、計測精度に影響するため無視できませんし、多軸サーボモータ制御の場合も同時性を保つ意味で無視できません。そこで、複数のスレーブ同士で入力と出力のタイミングを合わせる同期技術も含まれています。これは「DC(Distribution Clock)」という仕組みで実現されます。スレーブ間のわずかなオフセットタイムの演算とタイミングの調停は、ハードウェアによって自動的に行われます。
EtherCATでは、通信経路やスレーブ障害によるネットワーク全体のダウンを防止するために、EtherCATマスターに2つのEthernetポートを扱わせる形(リング)で二重化を構成することも可能です(図11)。

いかがでしたでしょうか。基本的にEtherCATは“とてもシンプルな設計の上に成り立っている”ということをご理解いただけたかと思います。仕様書を見ると分かりますが、その応用規格は多岐にわたり、これからも成長し続けていく伸びしろを、EtherCATは持っています。多くの可能性を持ったEtherCATの存在をヒントに、革新的な産業用オートメーションを生み出すきっかけとしていただければ幸いです。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 電源と通信をケーブル1本で結ぶ「EtherCAT P」、スレーブ実装ガイドラインが完成
電源と通信をケーブル1本で結ぶ「EtherCAT P」、スレーブ実装ガイドラインが完成
産業用オープンネットワークである「EtherCAT」を推進するEtherCAT Technology Group(ETG)は、電源と通信をケーブル1本で結べる省配線規格「EtherCAT P」のスレーブ実装ガイドラインが完成したことを発表した。 トヨタが工場内ネットワークでEtherCATを全面採用、サプライヤーにも対応要請
トヨタが工場内ネットワークでEtherCATを全面採用、サプライヤーにも対応要請
トヨタ自動車は、ハノーバーメッセ2016において、工場内の産業用ネットワークとしてEtherCATを全面採用する。既に2016年3月に国内のサプライヤーには対応を要請しているが、グローバルサプライヤーについても対応を求めていく。 なぜ工場でネットワークを考えないといけないのか
なぜ工場でネットワークを考えないといけないのか
インダストリー4.0や工場向けIoTなどに注目が集まっていますが、そもそも工場内のネットワーク環境は、どのように構築すべきなのでしょうか。本連載では、産業用イーサネットの導入に当たり、その基礎から設備設計の留意点などを含めて解説していきます。 いまさら聞けない IO-Link入門
いまさら聞けない IO-Link入門
インダストリー4.0などによりスマートファクトリーをはじめとする工場内IoTが注目を集める中、大きなカギを握る技術として注目度を高めてきているのが「IO-Link」です。製造現場のさらに末端情報を担うセンサーやアクチュエータからの情報取得を可能とするIO-Linkとは何かを、本稿では分かりやすく紹介します。 いまさら聞けない ORiN入門
いまさら聞けない ORiN入門
スマートファクトリーやインダストリー4.0など「つながる工場」を実現するカギとも見られる、工場情報システム用ミドルウェア「ORiN(オライン)」をご存じだろうか。なぜ今ORiNが注目を集めているのか。誕生の背景や活用シーン、技術の概要などを紹介する。 いまさら聞けないFL-net入門
いまさら聞けないFL-net入門
オープンPLCネットワークの「FL-net(エフ・エル・ネット)」をご存じでしょうか。工場のさらなる高度化が進む中、工場ネットワークのオープン化は加速しています。その中でPLCの相互互換性を確保するオープンPLCネットワーク(OPCN)にも注目が集まっています。OPCNを実現する「FL-net」の誕生背景やメカニズム、活用シーンなどを解説します。 ドイツが描く第4次産業革命「インダストリー4.0」とは?【前編】
ドイツが描く第4次産業革命「インダストリー4.0」とは?【前編】
「インダストリー4.0(Industrie 4.0)」という言葉をご存じだろうか? 「インダストリー4.0」は、ドイツ政府が産官学の総力を結集しモノづくりの高度化を目指す戦略的プロジェクトだ。インダストリー4.0とは何なのか。同プロジェクトに参画するドイツBeckhoff Automationグループに所属する筆者が解説する。