いまさら聞けない EtherCAT入門:産業用ネットワーク技術解説(3/4 ページ)
産業用オープンネットワーク「EtherCAT(イーサキャット)」をご存じだろうか。工場などの産業用オートメーションにおいて、フィールドネットワークのオープン化が進む中、なぜEtherCATの存在感が増しているのか。誕生背景やメカニズム、活用シーンなどを詳しく解説し、その秘密に迫る。
性能
1000点に要するI/O更新時間は、わずか30μ秒と高速です。1フレーム当たり1486バイトを保持できるプロセスイメージは、実に1万2000点のデジタルI/Oに相当します。これでもI/O更新は、300μ秒ほどで処理されます。
従来のリアルタイム通信方式では、ソフトウェアによるプロトコル処理がオーバーヘッドとなる分、このようなI/O更新時間を実現することは不可能でした。
スレーブの選定と開発
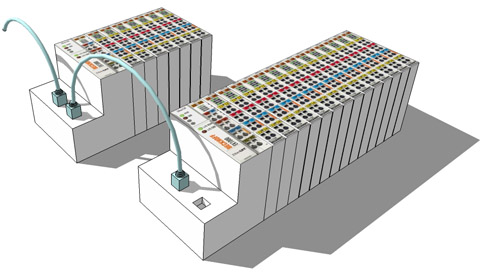
EtherCATスレーブは、世界的にさまざまな企業から市販されています。特に、ベッコフオートメーションの品ぞろえは豊富です(当たり前ですが)(図4)。
独自のEtherCATスレーブを開発することも可能です。ASICまたはFPGAを用いた実現方法があり、通信はハードウェアによってリアルタイムに行われるため、マイコンは必須ではありません。極めて価格を低く抑えた独自スレーブを開発できることもEtherCATの特長です。EtherCATスレーブの開発をスタートするには、FPGAスレーブサンプルコードが同梱されたEtherCAT評価キットを購入するといいでしょう(図5)。

図5 EtherCAT slave ASIC。「ET1100、ET1200|EtherCAT ASICs」(http://www.beckhoff.com/english.asp?ethercat/et1100_et1200.htm) ※出典:Beckhoff Automation
マスター実装、インフラの転用
EtherCATマスターは、どのように実現すればよいのでしょうか。
従来のフィールドネットワークでは、コントローラに専用の通信チップを増設することが必要でしたが、EtherCATではその必要がありません。既存のEthernetの資産を転用できますから、RJ45形状のEthernetポートが標準装備されている現在のPCであれば、ソフトウェアの導入のみでEtherCATマスター化が可能です。特別なハードウェアの増設なしに制御コンピュータとして活用できるのです(図6)。
実際のところ、EtherCATマスターの実現においては、マスターの作り出す通信サイクルが時間確定的、つまり、リアルタイムであることが求められます。そのため、市場で実用的に存在するEtherCATマスターとしては、リアルタイムOS向けのEtherCATマスターソフトウェアソリューション、Windowsにリアルタイム拡張を施した上で動作するEtherCATマスターソフトウェアソリューション、リアルタイム処理通信コプロセッサを搭載したEtherCATマスターの拡張カードソリューションなどが存在します。
制御アプリケーションとI/O手段としてのEtherCATマスターはいずれも、メモリ空間やAPIを通じて連携されます。
ソフトウェアによるEtherCATマスター処理でも、Ethernetコントローラが備えているDMA(Direct Memory Access)コントローラの存在によって、ホストCPUの負荷は高くなりません。制御アプリケーションが組み立てたメインメモリ上の出力データのDMA転送開始と、Ethernetコントローラが受信した入力データのDMA転送開始の指示だけで、基本的なEtherCAT通信は成り立ちます。もっとも、PCベース制御の世界では最先端のCPU能力が使えるので負荷に関しては心配無用です。
デバイスプロファイルの概念
EtherCATには、プロセスデータを繰り返し・周期的に転送する「サイクリック通信」とは別に、任意のタイミングで任意のスレーブへ指令発行、ステータス確認を実現する「メールボックス通信」が存在します。
これらの仕組みによって、EtherCATには既存のオープンプロトコルのキャリアとしての能力があり、「CANopen」「SERCOS」などとの融合が加味されています。冒頭で触れたように、半導体製造装置や、工作機械などでEtherCATが重要視されているのは、緻密なサーボモータの制御能力が他社製品との差別化につながるためです。具体的には、EtherCAT対応サーボモータスレーブが各モータメーカーから供給されており、CANopenのデバイスプロファイルである「CiA 402」に準拠したインタフェースでコントロールできます。EtherCATの高速なI/Oサイクルと組み合わせると、技術的に実現困難だったサーボモータの動きをソフトウェアで組めるとともに、サーボモータ制御専用装置を排することによるコスト削減も狙えます(図7)。

| 関連記事: | |
|---|---|
| ⇒ | 連載記事「CANopen入門」 |
Copyright © ITmedia, Inc. All Rights Reserved.