ソフトロボットの繊細な制御をリザバーコンピューティングで実現:ロボット開発ニュース
東京大学らは、液体相変化パウチアクチュエーターの複雑な履歴依存挙動をAIで学習する手法を開発した。AI技術「リザバーコンピューティング」を応用した独自のフレームワークを用いている。
東京大学は2025年10月20日、液体相変化パウチアクチュエーターの複雑な履歴依存挙動(ヒステリシス)をAI(人工知能)で学習する手法を開発したと発表した。AI技術「リザバーコンピューティング」を応用した独自のフレームワーク「PhysRes(Physical Hysteretic Reservoir)」を用い、これまで制御困難だった非線形ダイナミクスを予測可能にした。テキサス大学およびリバプール大学との共同研究によるものだ。

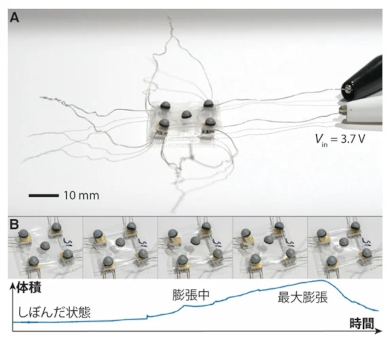
液体相変化パウチアクチュエーターは、内部の液体を加熱、気化して動作する柔軟な装置だ。ソフトロボットの駆動装置として有望視されている。過去の状態に依存するため制御が難しかったが、PhysResはこの履歴依存性を「情報」として活用。アクチュエーターの表面変形をモーションキャプチャーで取得し、AIモデルに時系列の位置座標データとして入力した。
まず、入力された全ての座標データを連結し、「状態行列」を構築。この行列の前半部分(現在の状態)を用いて、後半部分(未来の状態)を予測するようにモデルを訓練する。最終的に、この「状態」を入力として、アクチュエーターの振る舞いを支配する抽象的な内部状態(潜在空間)を、線形回帰という手法によってモデルを学習する。
開発されたモデルは、将来の変形状態を高精度に予測することに成功した。研究チームは、この技術を搭載したソフトロボットグリッパーを試作し、ティッシュやポテトチップスを損傷なく把持。物理的ヒステリシスをAIの「計算資源」として利用する新たな発想を実証した。

今後は、触覚情報の統合や、素材自体が環境を認識し、学習および判断する「計算する素材」への応用など、身体性を持つロボット知能への展開を進めていく。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 リザバーAIが操る「絶対に勝てないじゃんけん」、TDKがCEATEC2025で披露
リザバーAIが操る「絶対に勝てないじゃんけん」、TDKがCEATEC2025で披露
TDKは「CEATEC 2025」に出展し、北海道大学と共同開発したリザバーAIチップのプロトタイプを披露。加速度センサーと組み合わせた「絶対に勝てないじゃんけん」のデモを公開した。 色素増感型太陽電池を応用した「自己発電型」光電子シナプス素子を開発
色素増感型太陽電池を応用した「自己発電型」光電子シナプス素子を開発
東京理科大学は、色素増感型太陽電池を応用し、外部電源不要の「自己発電型」光電子シナプス素子を開発した。青から赤までの可視光スペクトルに対し、光の色ごとに変化する連続的な出力応答が可能だ。 そっと“鶴”もつかめる、早大発3軸触覚センサーでロボットハンドに触感
そっと“鶴”もつかめる、早大発3軸触覚センサーでロボットハンドに触感
XELA Roboticsは「Smart Sensing2025」において、同社の3軸触覚センサー「uSkin」を使った協働ロボットによるデモンストレーションを行った。 バイタル情報を無線でリアルタイム送信できる柔軟なセンサーパッチを開発
バイタル情報を無線でリアルタイム送信できる柔軟なセンサーパッチを開発
北海道大学は、心電図、呼吸、皮膚の温湿度を常時連続計測できる、ばんそうこうのように柔らかい無線型のフレキシブルマルチモーダルセンサーパッチを開発した。 スピン波を用いた物理リザバー計算機における高性能化の条件を解明
スピン波を用いた物理リザバー計算機における高性能化の条件を解明
東北大学は、スピン波を用いた物理リザバー計算機の学習性能向上に必要な波の速度と素子サイズの関係を解明した。検証の結果、少ない入出力ノード数で、短期記憶と非線形変換能力を持った学習が可能であることが判明した。 新しい駆動の在り方、ソフトロボット学が切り開く世界
新しい駆動の在り方、ソフトロボット学が切り開く世界
オンライン展示会「バーチャルTECHNO-FRONTIER2021冬」(2021年2月2〜12日)の講演に早稲田大学 理工学術院 教授の澤田秀之氏が登壇。「ソフトロボット学が切り拓く新しい世界〜機能的マテリアルとソフトロボットへの展開〜」をテーマとし、「やわらかい」ロボット実現に向けた機能性材料とその制御手法、ソフトロボットへの展開・展望について紹介した。