分子ロボットの「群れ」を開発、最大で直径30μmの物質輸送に成功:ロボット開発ニュース
北海道大学および関西大学は、分子ロボットの「群れ」を開発した。分子ロボット単体では直径3μm程度の物質しか輸送できなかったのに対し、群れでは最大で直径30μmの物質を輸送することに成功している。
新エネルギー・産業技術総合開発機構(NEDO)は2022年4月21日、「人と共に進化する次世代人工知能に関する技術開発事業」において、北海道大学と関西大学が分子ロボットの「群れ」を開発したと発表した。最大で直径30μmの物質の輸送に成功している。
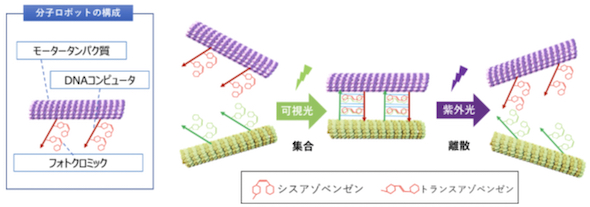
今回の研究では、まずモータータンパク質やDNA分子コンピュータ、フォトクロミック色素を化学的な手法で組み上げることで、単体で直径25nm、全長5μm程度の分子ロボットを開発した。フォトクロミック色素には、感光性分子のアゾベンゼンを用いており、群れの形成や解離を可視光や紫外光で遠隔操作することを可能とした。
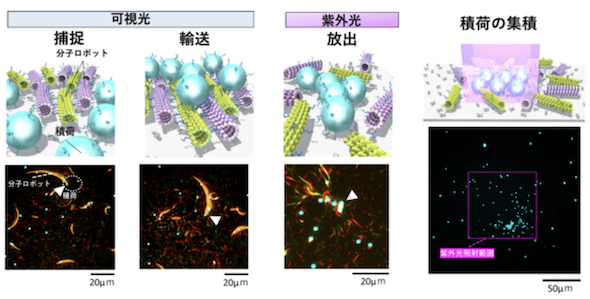
また、分子ロボットが輸送するプラスチック製のマイクロビーズには、表面にフォトクロミック色素を用いたDNAを修飾することで、光照射による結合解離機構を持たせた。これにより、分子ロボットが可視光照射下でマイクロビーズを捕捉し、紫外光照射下で放出することが可能となった。
分子ロボット単体と約100万体の分子ロボットの群れを用いてマイクロビーズの輸送実験を実施したところ、単体では直径3μm程度のマイクロビーズしか輸送できなかった。一方、群れでは、最大で直径30μmのビーズを輸送することに成功した。
直径3μm程度のマイクロビーズを用いて単体と群れの作業効率(時間あたりの輸送距離および輸送量)を比較したところ、群れによる輸送では5倍程度効率が向上することも明らかになった。
また、局所的に紫外光を照射することで、任意の場所にビーズを集められることを確認した。輸送の空間精度は30μm以下となっている。
今後両大学は、2020年より開発に共同で取り組んでいる分子ロボット総合研究所とともに、AI(人工知能)やVR(仮想現実)を組み込んだ研究開発の共創環境を構築し、それを活用した分子ロボットの研究を進める。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 新しい駆動の在り方、ソフトロボット学が切り開く世界
新しい駆動の在り方、ソフトロボット学が切り開く世界
オンライン展示会「バーチャルTECHNO-FRONTIER2021冬」(2021年2月2〜12日)の講演に早稲田大学 理工学術院 教授の澤田秀之氏が登壇。「ソフトロボット学が切り拓く新しい世界〜機能的マテリアルとソフトロボットへの展開〜」をテーマとし、「やわらかい」ロボット実現に向けた機能性材料とその制御手法、ソフトロボットへの展開・展望について紹介した。 紫外線と可視光で、高速かつ可逆的に形状変化する結晶システムを発見
紫外線と可視光で、高速かつ可逆的に形状変化する結晶システムを発見
龍谷大学は、光照射により結晶が急速かつ可逆的に屈曲する結晶システムを発見した。このシステムをソフトロボットに応用することで、光照射で物体を持ち上げたり、運んだりする機能を高速化できる。 高速振動する人工筋肉を利用したスピーカーを開発
高速振動する人工筋肉を利用したスピーカーを開発
芝浦工業大学は、人工筋肉を使ったスピーカーを開発した。球状や半球状に成形した誘電エラストマーアクチュエーターが高速振動し、スピーカーから全方位に音を伝達する。 角膜を参考に、無色透明で高靭性の材料を開発
角膜を参考に、無色透明で高靭性の材料を開発
名古屋大学は、透明な生体材料である角膜の構造を模倣することで、光学的には無色透明で、力学的には高靭性な複合エラストマーを開発した。今後、高度先進医療やウェアラブルディスプレイ、ソフトロボットなどの分野への応用が期待される。 液晶はディスプレイだけの材料じゃない、直動案内機器の潤滑性能を飛躍的に向上
液晶はディスプレイだけの材料じゃない、直動案内機器の潤滑性能を飛躍的に向上
日本トムソンは、「2019国際ロボット展(iREX2019)」において、「世界初」(同社)とする液晶材料を潤滑剤に用いる直動案内機器「液晶潤滑リニアウェイ」を展示した。 化学反応をコンピュータ制御できる、人工細胞型の微小反応容器
化学反応をコンピュータ制御できる、人工細胞型の微小反応容器
東京工業大学は、熱平衡状態から大きく離れた系の化学反応をコンピュータ制御できる「人工細胞型微小リアクター」の開発に成功した。将来は細胞を模倣した高機能な分子コンピュータや分子ロボットの開発につながるとしている。