日米ロボット、原子炉格納容器に通じる配管付近で高線量を計測:災害対策ロボット
東京電力は、原子炉格納容器の調査・補修工法の検討を目的に、福島第一原子力発電所 1号機 原子炉建屋内1階のパーソナルエアロック室の調査を実施。三菱電機特機システムの「FRIGO-MA」と米iRobotの「PackBot」を投入した。
東京電力は2013年4月9日、原子炉格納容器の調査・補修工法の検討を目的に、福島第一原子力発電所 1号機 原子炉建屋内1階のパーソナルエアロック室の調査を実施。2種類の遠隔操作ロボットを投入し、雰囲気線量率、格納容器貫通部周辺の状況確認を行った。
今回投入されたロボットは、三菱電機特機システムの「FRIGO-MA(フライゴー・エムエー)」と米iRobotの軍事用ロボット「PackBot(パックボット)」(関連記事1)である。操作・作業人員として、調査現場に東京電力社員4人、免震重要棟に東京電力社員4人と協力会社社員3人を配置し、線量率測定、目視確認(格納容器貫通部、床および天井の状況)、温湿度測定などの調査を実施した。

FRIGO-MAは、2012年11月7日に福島第一原子力発電所へ導入された。サイズは650×490×750mm、重さは38kg。パン・チルト・ズーム機能を備えたカメラによる映像の録画/録音、温度・湿度計測、線量計測、階段昇降機能などを備える。有線ケーブルによる操作が基本だが、ケーブル断線時に備え、無線による救援機能も搭載している。ちなみに、FRIGO-MAは、2012年11月27日に実施された、福島第一原子力発電所 3号機 原子炉格納容器ガス管理システムダクトの調査において、PackBotとともに初めて現場導入される予定だったが、不具合により使用されなかったという過去がある。その際、代わり導入されたのが、同調査の救援機としてスタンバイしていた千葉工業大学 未来ロボット技術研究センター(fuRo)の「Quince2」(関連記事2、関連記事3)だ。
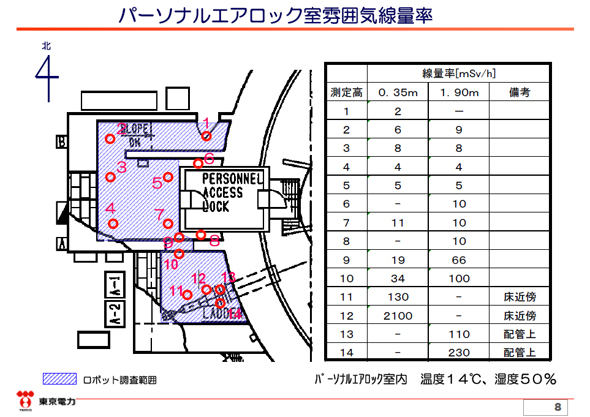
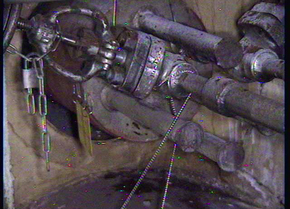
このたびの調査では、4月9日の11時29分に遠隔操作によるロボット調査を開始し、線量率測定、目視確認、温湿度測定を実施。同日14時21分に調査を終了し、格納容器に通じる配管付近の床付近で毎時2100mSvという高い放射線量を計測した。パーソナルエアロック室内の温度は14度、湿度は50%。ロボットの最大被ばく線量は、FRIGO-MAが57mSv、PackBotが210mSv。7.0mSvを計画していた作業者の最大被ばく線量は、0.72mSvと大きく下回った。ロボットの被ばく量の違いは、恐らく、有線操作のFRIGO-MAを中継機とし、無線操作でPackBotを操作し、線量の高い配管付近を調査したからではないかと考えられる。

なお、2013年3月28日に公表された計画によると、4月16日(予備:同月17日)には、福島第一原子力発電所 2号機 原子炉建屋内のMSトンネル室の調査に、Quince2とPackBotが導入される予定だ。
ロボット開発の最前線

Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
- >>「防災・災害対策技術」
 オールジャパンで挑む災害対策ロボット開発、実用化への道は?
オールジャパンで挑む災害対策ロボット開発、実用化への道は?
東日本大震災および東京電力・福島第一原子力発電所の事故発生当初、われわれに突き付けられたのは「日本の災害対策ロボットは実用レベルに達していない」という現実だった。あれから2年――。新エネルギー・産業技術総合開発機構(NEDO)の「災害対応無人化システム研究開発プロジェクト」の下、開発を進めてきた最新鋭の国産災害対策ロボット技術がプロジェクト完了を受けて一斉公開された。技術・運用面での課題はクリアできているのか? そして、実用への道は開けるのか? 「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告
「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告
IEEE(米国電気電子学会)は「日本のロボット利用に関する現状と課題 〜福島第一原発における災害用ロボット活用事例から読み解く〜」と題したセミナーを開催。国産ロボット「Quince(クインス)」の福島第一原発における活動状況について、その詳細が語られた。そして、なぜ、国産ロボットが真っ先に投入されなかったのか、その理由が明らかに!?