オールジャパンで挑む災害対策ロボット開発、実用化への道は?:あれから2年(1/3 ページ)
東日本大震災および東京電力・福島第一原子力発電所の事故発生当初、われわれに突き付けられたのは「日本の災害対策ロボットは実用レベルに達していない」という現実だった。あれから2年――。新エネルギー・産業技術総合開発機構(NEDO)の「災害対応無人化システム研究開発プロジェクト」の下、開発を進めてきた最新鋭の国産災害対策ロボット技術がプロジェクト完了を受けて一斉公開された。技術・運用面での課題はクリアできているのか? そして、実用への道は開けるのか?
新エネルギー・産業技術総合開発機構(NEDO)は2013年2月20日、千葉工業大学 芝園キャンパス(千葉県習志野市)において「災害対応無人化システム研究開発プロジェクト」の成果報告会を開催し、開発したロボット関連技術を報道陣に一斉公開した(関連記事1)。これらは、東京電力・福島第一原子力発電所(以下、福島第一)の原子炉建屋内での活用を想定して開発されたもので、今後、現場への実践投入が期待されている。

開発したのは「災害対策ロボットシステム」
福島第一の事故から2年が経過した。現在は、発生直後のような緊迫した状態ではなくなったものの、安全な廃炉に向けた作業には、まだまだ多くの困難が予測される。
ロボットに期待される役割の1つに、人間が入ったり、近寄ったりするには危険過ぎる災害現場などで、“人間に代わって活動してくれること”が挙げられる。しかし、東日本大震災および原発事故の発生により突き付けられたのは、技術や運用体制の面で、日本の災害対策ロボットは“まだまだ実用レベルではなかった”という現実だった(関連記事2)。
こうした課題を踏まえて、災害対策ロボットの開発を従来のような「研究開発」目的ではなく、より「実用」を強くイメージしたものとして捉え、発足されたのが、災害対応無人化システム研究開発プロジェクトだ。2011年度の第3次補正予算で約10億円が割り当てられ、2012年2月23日にプロジェクトがスタート。開発期間はわずか1年だったが、“オールジャパン体制”で作業ロボット、計測器、通信機などの開発に取り組んだ。
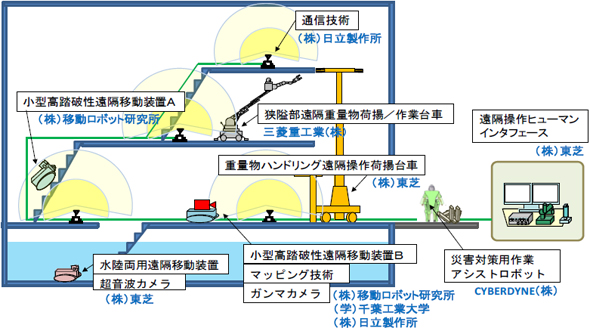
同プロジェクトの最大の特徴は、各社がバラバラの仕様でロボットを開発するのではなく、統合された“システム”として作り込まれている点にある。複数のロボットが災害現場に投入された場合、ロボットごとにユーザーインタフェース(以下、UI)が異なっていては、操縦者が混乱してしまう。そのため、基本的なUIを統一し、ほぼ同様の画面やコントローラで、各社のロボットを操作できるよう配慮してある。
さらに、ロボット同士の連携も想定。三菱重工業が開発した重さ4tの高所作業ロボットを、東芝の荷揚ロボットの上に乗せて、上層階へと運ぶことが可能だ。また、日立製作所が開発したガンマカメラを、移動ロボット研究所のローバーに乗せて、原子炉建屋内を自由に移動することもできる。
これら総合的な取り組みにより、災害現場などにおいて、無人ロボットによる先行調査から、大型ロボットによる機材の搬入や復旧活動、ロボットスーツを装着した人間による作業まで、幅広く対応できるという。
それでは、同プロジェクトで開発されたロボット関連技術について詳しく見ていこう。
オールジャパン体制で開発されたロボット関連技術
小型高踏破性遠隔移動装置(移動ロボット研究所)
千葉工業大学発のベンチャー企業である移動ロボット研究所は、狭隘(あい)空間先行調査型移動ロボット「Sakura(櫻)」と重量計測器搭載型移動ロボット「Tsubaki(椿)」という2台のローバーを開発した(関連記事3)。
いずれも、福島第一に投入実績のある「Quince」と同様に、全面クローラの本体と、4本のサブクローラを組み合わせたスタイルのロボットだ(関連記事4、関連記事5)。階段の昇降も可能な走破性能の高さはそのままに、Sakuraは小型化、Tsubakiは高パワー化を実現している。


Quinceは、原子炉建屋の上層階に行くことには成功したものの、地下への階段は踊り場が狭く、先に進むことができなかった。これを踏まえ、今回開発したSakuraは全長50cmに抑えられており、幅70cmしかない地下階段の狭い踊り場でも旋回が行える。また、地下への階段の角度は42度あり、地上の階段より2度ほど急であるが、Sakuraは低重心に設計してあるため、急傾斜でも問題なく昇降できる。
今後、原子炉建屋内の除染・遮蔽(しゃへい)作業を進めていくためには、後述のガンマカメラによる調査が必要であるが、高線量下で使用するガンマカメラは非常に重たい。Tsubakiはこのような重量物を搭載できるよう開発されたロボットであり、強力なモーターを採用している他、サブクローラも長くなっており、重さ80kgのガンマカメラを搭載したまま階段の昇降が行える。
また、階段の昇降時はできるだけロボットの重心を下げる必要があるため、ガンマカメラをリフトアップするパンタグラフ機構を備えている。これにより、移動時はカメラ位置を低く保ち、撮影時は高い位置から俯瞰(ふかん)して床面の汚染状況を正確に測定することができる(カメラを上下・左右に振るパン・チルト機構も装備)。
これに加え、千葉工業大学は、自動でロボットを充電するシステムと、除染するシステムも開発した。
本来、原発事故での利用を想定していなかったQuinceは、ロボットが戻ってすぐに再出動できるよう、バッテリー交換方式を採用していた。しかし、原発事故においては、バッテリー交換時に作業員が被ばくしてしまうという問題があった。後継機の「Rosemary」は、プラグイン充電方式へと変更したものの、充電を開始するには作業員がロボットに近づかなければならず、被ばくを防ぐことはできない。
今回開発した「遠隔自動充電システム」は、ロボットがバックで進入するだけでコネクタがつながる充電ステーションを備える。充電のための人手が不要となり、作業員の被ばくをなくせる。充電ステーションを原子炉建屋内に設置しておけば、ロボットは拠点まで戻らずに、自動で充電して再び出動することが可能になる。

また、原子炉建屋内を走行した後のロボットは放射性物質により汚染されており、これがメンテナンス作業の妨げになる。経年劣化を抑えるためにも、使用後はしっかりと除染する必要があるのだが、やはり作業員の被ばくはできるだけ抑えたい。そこで、ロボットが自走して除染槽に入り、ローラー上を空走することでクローラを洗浄する「遠隔除染システム」を開発した。

Copyright © ITmedia, Inc. All Rights Reserved.