国際宇宙ステーション内の自律移動型船内カメラにIMUが採用:組み込み採用事例
国際宇宙ステーション「きぼう」日本実験棟内で機能実証中のJEM自律移動型船内カメラ「Int-Ball2」に、セイコーエプソンのIMU「M-G370Series」が採用された。
セイコーエプソンは2024年3月11日、国際宇宙ステーション「きぼう」日本実験棟内で機能実証を行っている「JEM自律移動型船内カメラ」の2号機となる「Internal Ball Camera2(Int-Ball2)」に、同社のIMU(慣性計測ユニット)「M-G370Series」が採用されたことを発表した。2023年6月より、稼働を開始している。
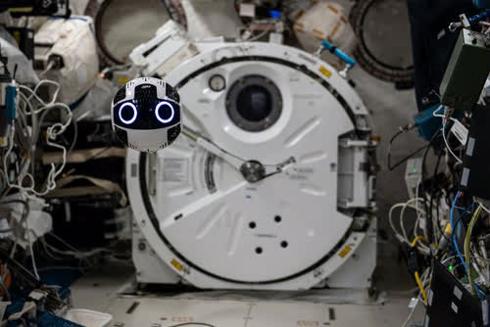
Int-Ball2は、国際宇宙ステーション内を飛び回り、宇宙飛行士の代わりに写真や動画を撮影するドローンロボット。地上の管制員が操作し、宇宙飛行士が作業する様子などをカメラで撮影してモニターする。
充電式となっており、充電器へは自動で帰還する。その際、無重力空間を3自由度位置(X、Y、Z)と、3つの自由度回転姿勢(ロール、ピッチ、ヨー)を制御しながら空中経路を生成して帰還する。
宇宙航空研究開発機構(JAXA)では、日本実験棟内での撮影自動化に向け、Int-Ball2の「自律飛行技術」「充電器への自動ドッキング技術」の実証に成功した。同実証にはセイコーエプソンのIMUを活用しており、無重力空間における飛行制御の空間位置と回転姿勢の検出に貢献した。

M-G370Seriesは、低ノイズな3軸ジャイロと3軸加速度を備えた6軸センサーモジュール、独自の水晶製ジャイロセンサーを搭載する。24×24×10mm3、10gと小型軽量で、3.3V、16mAのローパワー設計となっている。
国際宇宙ステーションでは現在、宇宙飛行士がカメラの設定や画角などを調整して撮影している。今後、Int-Ball2を使用することで、地上から遠隔で撮影に関する一連作業を操作可能になり、宇宙飛行士の作業負担軽減が期待される。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 高性能6軸センサーを搭載した低ノイズの慣性計測ユニット
高性能6軸センサーを搭載した低ノイズの慣性計測ユニット
セイコーエプソンは、高性能6軸センサーを搭載した慣性計測ユニットの新製品「M-G370PDT」の量産を開始した。従来製品の特徴を併せ持つ、1インチサイズで低ノイズのプレミアムモデルだ。 多様な動作を高精度に計測する、慣性計測ユニットのハイスペックモデル
多様な動作を高精度に計測する、慣性計測ユニットのハイスペックモデル
セイコーエプソンは、高性能な6軸センサーを搭載した慣性計測ユニットのハイスペックモデル「M-G370PDG」を発表した。ゆっくりした動作から早い動作まで、多様な動作を高精度に計測できる。 電子材料の宇宙環境耐久性を評価する宇宙暴露実験の1次評価結果を発表
電子材料の宇宙環境耐久性を評価する宇宙暴露実験の1次評価結果を発表
パナソニック インダストリーは、同社の電子材料の宇宙環境耐久性を評価する宇宙暴露実験について、1次評価の結果を発表した。実験サンプルを約2カ月間、宇宙空間にさらし、材料特性の変化を調べた。 国際宇宙ステーション船内カメラのシステム統合ソフトや撮影機能を開発
国際宇宙ステーション船内カメラのシステム統合ソフトや撮影機能を開発
セックは、国際宇宙ステーション日本実験棟「きぼう」の自律移動型船内カメラ「Int-Ball2」の開発に協力した。Int-Ball2の撮影機能やシステム統合ソフトウェア、Int-Ball2を遠隔操作する地上運用支援システムの開発などを手掛けた。 ELTRES対応の衛星無線実験装置が、地上からの電波を宇宙で受信
ELTRES対応の衛星無線実験装置が、地上からの電波を宇宙で受信
ソニー独自のIoT向けLPWA通信規格「ELTRES」に対応した衛星無線実験装置が、地上のIoTデバイスから送出した電波を、上空400kmの軌道上を高速移動するISS(国際宇宙ステーション)で高精度に受信した。 宇宙では腎臓の遺伝子発現が変動し、血圧や骨の厚みが変化する
宇宙では腎臓の遺伝子発現が変動し、血圧や骨の厚みが変化する
東北大学は、1カ月間の宇宙旅行から帰還したマウスの腎臓で、血圧と骨の厚さを調節する遺伝子の働きが変動していることを発見した。また、宇宙旅行で血液中の脂質が増加し、腎臓で脂質代謝に関係する遺伝子の発現が増加することも分かった。