ニュース
柔らかく小さな物でも柔軟につかめる電動3爪ロボットハンド:FAニュース
シナノケンシは、異型物を柔軟につかめる「電動3爪ロボットハンド」を開発した。製造現場の非定型物や柔らかい物、小さい物を扱う手作業の工程において、自動化移行への提案を進めていく。
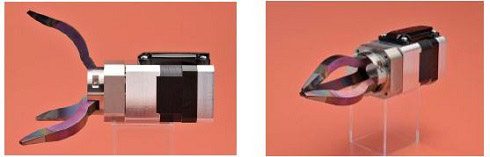
シナノケンシは2017年11月22日、異型物を柔軟につかめる「電動3爪ロボットハンド」を開発したと発表した。3本の爪の開閉により、直径約10〜114mmサイズを把持できる。
ステッピングモーターとサーボ制御を組み合わせ、機構部分に特殊なカムを採用。爪が対象物を把持する際のステッピングモーターの電流と回転の変化を計測することで、コントローラーが対象物の柔・硬を判別し、最適な把持力と把持速度を調整・保持する。
また、ロボットハンドとモーターが一体になった構造の中央部に中空(穴)構造を採用。中空の直径はφ8mmで、対象物を把持した状態でさまざまな追加作業を組み合わせることが可能だ。
本体サイズは約42×50×150mm(爪を閉じた状態)で、重さは約750g。電源はDC24Vで、通信インタフェースはRS-485を採用する。さらに、2爪の他、金属や樹脂などの材質にも用途に合わせて変更できるように、爪のバリエーションを開発している。
同社は小物組み立てや食品、医薬品、化粧品などの製造現場での非定型物や柔らかい物、小さい物のため人による手作業が困難な工程において、自動化移行に向けて電動3爪ロボットハンドの提案を進めていく予定だ。


Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
2016年は人工知能関連技術が大きな注目を集めて「機械が人間の仕事を奪う」という議論が大いに盛り上がりを見せた。こうした一方で2017年には「現場」において、こうした動きと逆行するように見える「人とロボットが協力して働く世界」が始まりを迎える。 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。 リアル過ぎてキモい! タコ足を模したロボットハンド
リアル過ぎてキモい! タコ足を模したロボットハンド
ドイツのFestoは、ハノーバーメッセ2017において「タコの足」をモチーフとしたロボットアームとロボットハンドを紹介した。軸による動きの制限を受けない他、対象物の素材や形状などにこだわらずさまざまなものを自由につかめるのが特徴。 双腕型ロボットが自動でタオルをたたみサラダを盛り付ける、AI学習はVRシステム
双腕型ロボットが自動でタオルをたたみサラダを盛り付ける、AI学習はVRシステム
デンソーウェーブは、ベッコフオートメーション、エクサウィザーズなどと共同開発した「マルチモーダルAIロボット」について説明。多指ハンドを装着した双腕型ロボットアームをディープラーニングで得たアルゴリズムによってリアルタイムで制御するAIロボットであり、自動でタオルをたたんだり、サラダを盛り付けたりするデモを披露した。 技術賞は“かしこいロボットハンド”、人とロボットの協働を実現に
技術賞は“かしこいロボットハンド”、人とロボットの協働を実現に
ドイツ SCHUNKのスマート把持システム「JL1 co-act gripper」が、ハノーバーメッセ2017の「HERMES AWARD 2017」を受賞した。