ƒچƒ{ƒbƒgƒXƒLƒ“‚ة‰—p‰آ”\‚بگGٹo“®چى‚ً”Fژ¯‚·‚éƒZƒ“ƒTپ[ƒVƒXƒeƒ€پFƒچƒ{ƒbƒgٹJ”ƒjƒ…پ[ƒX
NEDO‚ئJAPERA‚حپAچ‚گ¸چ×پ^چ‚ٹ´“x‚بˆ³—حƒZƒ“ƒTپ[‚ئپA‚±‚ê‚ًƒچƒ{ƒbƒgپEƒXƒLƒ“‚ة‰—p‚·‚éƒVƒXƒeƒ€‚ًٹJ”‚µ‚½پB‚ب‚إ‚éپA‚½‚½‚پA‚à‚ق‚ب‚ا‚ج‚³‚ـ‚´‚ـ‚بگGٹo“®چى‚ًƒچƒ{ƒbƒg‚ة”Fژ¯‚³‚¹‚邱‚ئ‚ھ‚إ‚«‚éپB
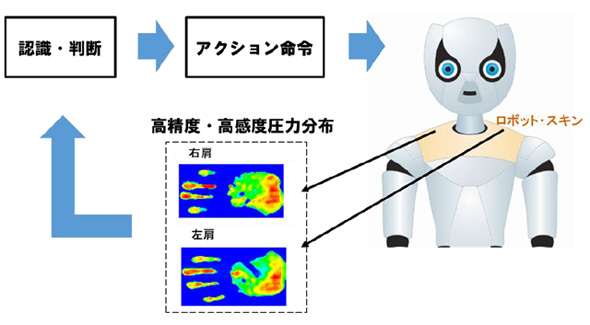
پ@گVƒGƒlƒ‹ƒMپ[پEژY‹ئ‹Zڈp‘چچ‡ٹJ”‹@چ\پiNEDOپj‚ئژںگ¢‘مƒvƒٹƒ“ƒeƒbƒhƒGƒŒƒNƒgƒچƒjƒNƒX‹ZڈpŒ¤‹†‘gچ‡پiJAPERAپj‚ح2017”N10Œژ2“ْپAچ‚گ¸چ×پ^چ‚ٹ´“x‚بˆ³—حƒZƒ“ƒTپ[‚ئپA‚±‚ê‚ًƒچƒ{ƒbƒgƒXƒLƒ“‚ة‰—p‚·‚éƒVƒXƒeƒ€‚ًٹJ”‚µ‚½‚ئ”•\‚µ‚½پB“¯ƒVƒXƒeƒ€‚ة‚و‚èپA‚ب‚إ‚éپA‚½‚½‚پA‚à‚ق‚ب‚ا‚ج‚³‚ـ‚´‚ـ‚بگGٹo“®چى‚ًƒچƒ{ƒbƒg‚ة”Fژ¯‚³‚¹‚邱‚ئ‚ھ‚إ‚«پAƒچƒ{ƒbƒg‚ًƒqƒg‚ئ“¯‚¶ٹ´ٹo‚ًژ‚آ‚و‚¤‚ة”½‰‚³‚¹‚邱‚ئ‚ھ‚إ‚«‚éپB
پ@“¯ƒVƒXƒeƒ€‚ة—p‚¢‚ç‚ê‚鈳—حƒZƒ“ƒTپ[ƒVپ[ƒg‚حپAJAPERA‚ھNEDO‚جپuژںگ¢‘مƒvƒٹƒ“ƒeƒbƒhƒGƒŒƒNƒgƒچƒjƒNƒXچق—؟پEƒvƒچƒZƒXٹî”ص‹ZڈpٹJ”پvƒvƒچƒWƒFƒNƒg‚ة‚¨‚¢‚ؤٹJ”‚µ‚½‚à‚جپBƒZƒ“ƒVƒ“ƒO‚·‚éٹe“_‚ةƒXƒCƒbƒ`ƒ“ƒOƒgƒ‰ƒ“ƒWƒXƒ^‚ًژ‚آƒAƒNƒeƒBƒuƒ}ƒgƒٹƒbƒNƒX•ûژ®‚ًچج—p‚µپAڈ]—ˆ‚جƒpƒbƒVƒuƒ}ƒgƒٹƒbƒNƒX•ûژ®‚ة”ن‚×پAƒZƒ“ƒVƒ“ƒO‚·‚é“_‚ج–§“x‚ًچ‚‚‚µ‚ؤ‚àچ‚‚¢ٹK’²گ”‚ً•غ‚آ‚±‚ئ‚ھ‚إ‚«پAچ‚گ¸چ׉»‚ئچ‚ٹ´“x‰»‚ھ‰آ”\‚ة‚ب‚éپB
پ@‚±‚جƒAƒNƒeƒBƒuƒ}ƒgƒٹƒbƒNƒX‚ج—L‹@”––Œƒgƒ‰ƒ“ƒWƒXƒ^‚حپAڈ_‚ç‚©‚بƒtƒBƒ‹ƒ€ڈم‚ة‘S‚ؤˆَچüƒvƒچƒZƒX‚إŒ`گ¬‚إ‚«پAڈ_‚ç‚©‚–تڈَ‚جƒZƒ“ƒTپ[‚ًŒ`گ¬‚إ‚«‚éپBˆَچüƒvƒچƒZƒX‚حپAگ^‹َƒvƒچƒZƒX‚ً•K—v‚ئ‚·‚éƒtƒHƒgپEƒٹƒ\ƒvƒچƒZƒX‚ة”ن‚ׂؤ‘ه•‚بƒvƒچƒZƒXٹب—ھ‰»‚ھٹْ‘ز‚إ‚«پA‚ـ‚½پAگ»‘¢ژ{گف‚جڈبƒXƒyپ[ƒX‰»‚âژg—pچق—؟‚جڈبژ‘Œ¹‰»‚ھ‰آ”\‚ئ‚ب‚éپBچق—؟“h‚è•ھ‚¯‚ة‚و‚鑽‹@”\‰»‚àٹْ‘ز‚إ‚«پA‚»‚ج1‚آ‚ئ‚µ‚ؤ“¯”N2Œژ‚ة”•\‚µ‚½ˆ³—حپ^‰·“x“¯ژŒںڈoƒVپ[ƒgƒZƒ“ƒTپ[‚ج‹Zڈp‚ة‚و‚鉷ٹ´‚ج•t—^‚àŒں“¢‚µ‚ؤ‚¢‚é‚ئ‚¢‚¤پB
پ@چ،‰ٌٹJ”‚µ‚½ˆ³—حƒZƒ“ƒTپ[ƒVپ[ƒg‚حƒtƒŒƒLƒVƒuƒ‹ƒtƒBƒ‹ƒ€ڈم‚ةچ\گ¬‚µ‚½‚à‚ج‚¾‚ھپAچ،ŒمٹîچقƒtƒBƒ‹ƒ€‚ًƒXƒgƒŒƒbƒ`ƒƒƒuƒ‹‘fچق‚ة‘ض‚¦‚邱‚ئ‚إپA‚³‚ـ‚´‚ـ‚ب3ژںŒ³‹ب–ت‚ض‚ج‘خ‰‚âƒپƒfƒBƒJƒ‹—p“r‚إ‚ج‰—p‚ھٹْ‘ز‚³‚ê‚éپB
Copyright © ITmedia, Inc. All Rights Reserved.
ٹضکA‹Lژ–
 ƒچƒ{ƒbƒgٹJ”‚إ’چ–ع‚³‚ê‚éپuROSپvپiRobot Operating Systemپj‚ئ‚ح‰½‚©
ƒچƒ{ƒbƒgٹJ”‚إ’چ–ع‚³‚ê‚éپuROSپvپiRobot Operating Systemپj‚ئ‚ح‰½‚©
ƒچƒ{ƒbƒg‚جکb‘è‚ً•·‚‚±‚ئ‚ھ‘‚¦‚½‚ھپA”»’f‚ئگ§ŒنپA‹ى“®‚ً”ُ‚¦‚½ƒچƒ{ƒbƒg‚ًچى‚é‚ج‚ح‚©‚ب‚èچœ‚ھگـ‚ê‚éپB‚»‚ج•‰’S‚ًŒyŒ¸‚·‚éƒtƒŒپ[ƒ€ƒڈپ[ƒN‚ھپuROSپvپiRobot Operating Systemپj‚¾پB ƒچƒ{ƒbƒg‚جپuگGٹoپv‚ًƒvƒٹƒ“ƒeƒbƒhƒGƒŒƒNƒgƒچƒjƒNƒX‚إژہŒ»
ƒچƒ{ƒbƒg‚جپuگGٹoپv‚ًƒvƒٹƒ“ƒeƒbƒhƒGƒŒƒNƒgƒچƒjƒNƒX‚إژہŒ»
ژںگ¢‘مƒvƒٹƒ“ƒeƒbƒhƒGƒŒƒNƒgƒچƒjƒNƒX‹ZڈpŒ¤‹†‘gچ‡‚حپuCEATEC JAPAN 2017پv‚إپAƒvƒٹƒ“ƒeƒbƒhƒGƒŒƒNƒgƒچƒjƒNƒX‚ة‚و‚éچ‚گ¸“xپEچ‚ٹ´“xˆ³—حƒZƒ“ƒTپ[ƒVپ[ƒg‚ً”âکIپBƒچƒ{ƒbƒg‚ة‘•’…‚µ‚ؤپAگعگG‚ة‚و‚éˆسژv‘a’ت‚جƒfƒ‚‚ًچs‚ء‚½پB گ¢ٹEڈ‰‚ج—حگGٹoگ§Œن‚ًژہŒ»‚µ‚½‘oکrƒچƒ{ƒbƒgپAپuŒإ‚‚ؤڈ_‚ç‚©‚¢پv–µڈ‚‚ً‰ًŒˆ
گ¢ٹEڈ‰‚ج—حگGٹoگ§Œن‚ًژہŒ»‚µ‚½‘oکrƒچƒ{ƒbƒgپAپuŒإ‚‚ؤڈ_‚ç‚©‚¢پv–µڈ‚‚ً‰ًŒˆ
NEDO‚ئŒcœن‹`ڈm‘هٹw‚حپAگg‘جٹ´ٹo‚ً“`‘—‰آ”\‚ب‘oکrŒ^ƒچƒ{ƒbƒgپuGeneral Purpose Armپv‚جٹJ”‚ةگ¬Œ÷‚µ‚½پBپuگ¢ٹEڈ‰پv‚ئ‚·‚é—حگGٹo‚ة‰‚¶‚½گ§Œن‚ة‚و‚èپA—ح‰ءŒ¸‚ً’²گك‚µ‘½—l‚بچى‹ئ‚ًڈ_“î‚ةچs‚¦‚邱‚ئ‚ھچإ‘ه‚ج“ء’¥پBپuŒإ‚‚ؤڈ_‚ç‚©‚¢پv‚ئ‚¢‚¤–µڈ‚‚µ‚½گ§Œن‚ھ•K—v‚ب—حگGٹo‚ح‚ا‚ج‚و‚¤‚ةژہŒ»‚³‚ꂽ‚ج‚©پB گGٹo‚ًژg‚ء‚½‰®“àƒiƒrƒQپ[ƒVƒ‡ƒ“‚جژہڈطژہŒ±‚ًٹJژn
گGٹo‚ًژg‚ء‚½‰®“àƒiƒrƒQپ[ƒVƒ‡ƒ“‚جژہڈطژہŒ±‚ًٹJژn
NTTƒfپ[ƒ^پANTTƒfپ[ƒ^ƒCƒ^ƒٹƒAپANTT‚حپuگGٹo‚ًژg‚ء‚½‰®“àƒiƒrƒQپ[ƒVƒ‡ƒ“پv‚جژہڈطژہŒ±‚ًٹJژn‚·‚éپBگGٹoژhŒƒ‚ة‚و‚éŒ،پi‚¯‚ٌپjˆّٹ´ٹoگ¶گ¬‹Zڈp‚ئپA’nژ¥‹C‚ً—p‚¢‚½ƒCƒ“ƒhƒAƒ}ƒbƒvپEƒiƒrƒQپ[ƒVƒ‡ƒ“‹Zڈp‚ً‘g‚فچ‡‚ي‚¹‚½‚à‚ج‚إپAگU“®‚ة‚و‚è’¼ٹ´“I‚ب—U“±‚ھ‚إ‚«‚éپB ƒچƒ{ƒbƒg‚ج—ح‰ءŒ¸‚ً’²گك‚·‚éڈWگد‰»گGٹoƒZƒ“ƒTپ[‚جٹJ”‚ةگ¬Œ÷
ƒچƒ{ƒbƒg‚ج—ح‰ءŒ¸‚ً’²گك‚·‚éڈWگد‰»گGٹoƒZƒ“ƒTپ[‚جٹJ”‚ةگ¬Œ÷
“Œ–k‘هٹw‚حپAMEMS‹Zڈp‚ة‚و‚é3ژ²—حƒZƒ“ƒTپ[‚ئگê—p‚جپuƒZƒ“ƒTپ[ƒvƒ‰ƒbƒgƒtƒHپ[ƒ€LSIپv‚ئ‚ًƒڈƒ“ƒ`ƒbƒv‰»‚µ‚½ڈWگد‰»گGٹoƒZƒ“ƒTپ[‚ًٹJ”‚µ‚½پB‚±‚ê‚ة‚و‚èپAƒچƒ{ƒbƒg‚ج—ح‰ءŒ¸‚ً“Kگط‚ة’²گك‚·‚邽‚ك‚ة•K—v‚ب—v‘f‚ھپA‘S‚ؤ“¯ژ‚ة’Bگ¬‚إ‚«‚é‚و‚¤‚ة‚ب‚ء‚½پB ƒVپ[ƒ‹‚ج‚و‚¤‚ة‘ج‚ة’£‚ê‚éپuƒ^ƒbƒ`ƒZƒ“ƒTپ[پvپ\پ\ڈ«—ˆ‚حƒچƒ{ƒbƒgƒXƒLƒ“‚ض‰—p‚à!?
ƒVپ[ƒ‹‚ج‚و‚¤‚ة‘ج‚ة’£‚ê‚éپuƒ^ƒbƒ`ƒZƒ“ƒTپ[پvپ\پ\ڈ«—ˆ‚حƒچƒ{ƒbƒgƒXƒLƒ“‚ض‰—p‚à!?
‰بٹw‹ZڈpگU‹»‹@چ\پiJSTپj‚ئ“Œ‹‘هٹw‚حپA“Œ‹‘هٹw‘هٹw‰@ چHٹwŒnŒ¤‹†‰ب‚جگُ’J—²•v‹³ژِپAٹض’J‹Bڈy‹³ژِپAƒ}پ[ƒ`ƒ“پEƒJƒ‹ƒeƒ“ƒuƒ‹ƒ“ƒiپ[”ژژmŒ¤‹†ˆُ‚ç‚ھپAگ¢ٹEچإŒy—ت‚إچإ”–‚ج“dژq‰ٌکH‚جٹJ”‚ةگ¬Œ÷‚µپAƒ^ƒbƒ`ƒZƒ“ƒTپ[‚ة‰—p‚µ‚½‚±‚ئ‚ً”•\‚µ‚½پB