バイポーラ型ステッピングモーターの制御:Arduinoで学ぶ基礎からのモーター制御(8)(1/5 ページ)
精密制御に欠かせないステッピングモーター。今回はバイポーラ型ステッピングモーターについて、その制御をマイコン(Arduino)から行います。
はじめに
今回も前回に引き続き、ステッピングモーターの制御についてお話します。
ステッピングモーターは一般的な“モーター”と異なり、「回転子が決まった角度を連続して移動(回転)するデバイス」であり、その形式には巻き線の電流を1方向に流す「ユニポーラ型」と、巻き線の電流を双方向に流す「バイポーラ型」が存在します。今回はバイポーラ型の制御がテーマです。
バイポーラ型とユニポーラ型の駆動
下図はバイポーラ型とユニポーラ型のステッピングモーターを比較したものです。左のM1がユニポーラ型、右のM2がバイポーラ型です。
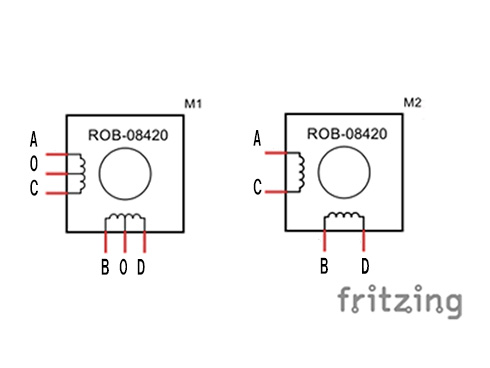
ユニポーラ型が2組のコイル中央にタップがあるのに対して、バイポーラ型は2組のコイルがあるだけです。端子数も6本と4本で異なります。
ユニポーラ型はAとOの間に電流を流した後にフェーズの異なるBとO間で電流を流し、そして次にCとO間、最後にDとO間へと順次、電流を流します。これを繰り返すことにより軸は回転します。両フェーズのタップ(O)は常にグランドあるいはプラス電源に固定されています。
それに対しバイポーラ型の駆動方法は電流の向きを変える操作が必要です。まずAからCに電流を流した後、今度はDからBに電流を流します。次に先ほどとは逆にCからAに電流を流し、最後にBからDに電流を流します。これを繰り返すことにより軸を回転させます。
ユニポーラ型は回転時の各フェーズのコイルのどちらか半分は電流が流れていない状態なのですが、バイポーラ型は電流の向きは逆になりますが常にコイルは機能しています。ですので、バイポーラ型のほうが同じ巻き数のコイルであればより効率よく回転させることができます。またコイルの中間からタップを出す必要がなく電気的により単純な構造となります。
その反面、ユニポーラ型の駆動は電流を流すコイルを切る替えるだけでよかったに対しバイポーラ型は電流の向きを変える操作をしなければなりませんので、駆動回路はより複雑になります。
手動スイッチングで動かしてみる
前回のユニポーラ型と同様、タクトスイッチを使って手動でパルスを生成しバイポーラ型ステッピングモーターを動かしてみます。トグルスイッチを使えばより簡単に操作できる回路を組むこともできるのですが、動作原理を確認するため、今回もタクトスイッチを使って回路を構成してみます。

タクトスイッチのS1とS4を同時に押すと、1ステップ軸が回転します。次にS5とS8を同時に押します。次にS1とS3を同時に押します。そしてS7とS6を同時に押します。この順番でこの操作を繰り返すと正回転します。これと逆の順にスイッチを押すと逆回転します。
それではコイルにかかる電流の向きを詳しく見てみましょう。
S1が閉じるとステッピングモータのコイルのA-1端子にプラス電圧がかかります。S3が閉じるとコイルのA-2端子が電源のグランドに通じます。これが同時に起きるとコイルのA-1端子からA-2端子に電流が流れます。すると1ステップ分軸が回転します。
次にS5とS8が同時に閉じた場合を見てみましょう。S5が閉じることによりコイルのB-1端子にプラス電源がつながります。またS8が閉じるとコイルのB-2端子が電源のグランドにつながります。
S3とS2が閉じるとA-1端子にグランドA-2端子にプラス電源がつながります。S7とS6が閉じるとB-1端子にプラス電源、B-2端子にグランドがつながります。これを循環的に繰り返すことによりバイポーラ型のステッピングモーターの軸を回転させることができます。

このスイッチ操作では、対面しているスイッチ(S1/S2、S3/S4、S5/S6、S7/S8)の組み合わせを同時に押さないでください。電源が短絡してしまい危険です。最近の電源回路には保護装置入っていることが多く大事には至らないと思いますが、電池を使っている場合には電池が発熱する場合があります。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 ステッピングモーターの制御
ステッピングモーターの制御
前回までは“マブチモーター”に代表される「直流ブラシ付きモーター」を、マイコン(Arduino)で制御する方法を紹介してきました。今回からは「ステッピングモーター」の制御に取り組みます。 PWMを使ったサーボモーターの制御
PWMを使ったサーボモーターの制御
ラジコンカーのステアリングやロボットの関節などに用いられ、角度を指定して動かす機能を持つのが「サーボモーター」です。今回はArduinoからこのサーボモーターの制御をPWMを用いて行う手法を紹介します。 PWMでマブチモーターを制御する
PWMでマブチモーターを制御する
「マブチモーター」でもおなじみ「直流ブラシ付きモーター」は安価で入手性もよいモーターですが、マイコンからの制御を考えると一工夫必要になります。今回は「PWM」を使った回転制御を紹介します。 困ったら読みたいマブチモーター制御のTips
困ったら読みたいマブチモーター制御のTips
この連載ではここ数回、「マブチモーター」に代表される直流ブラシ付きモーターをマイコンから制御する話をしていますが、今回は困ったときに読みたい、知っておくと便利なTipsを幾つか紹介したいと思います。 マブチモーターのノイズ対策
マブチモーターのノイズ対策
「マブチモーター」に代表される直流ブラシ付きモーターは安価で入手性も良好ですが、Arduinoなどと組み合わせる際には発生するノイズが問題となることがあります。そこで今回は、「直流ブラシ付きモーターのノイズ対策」について解説します。 マブチモーターをArduinoで制御する
マブチモーターをArduinoで制御する
「マブチモーター」でもおなじみ「直流ブラシ付きモーター」は安価で入手性もよいモーターです。これをArduinoで制御するとしたら、何を理解して何を用意して、どんなプログラミンが必要でしょうか。実験します。