ニュース
世界モデルで人の動きと心理状態を予測、ロボットを制御するフィジカルAIを開発:ロボット開発ニュース
NECは、人の動きと心理状態を予測する「人間系世界モデル」を活用し、人の不安を定量的に推定してロボットの制御に反映するフィジカルAI技術を開発した。人とロボットの協働を進め、労働力不足解消に寄与する。
NECは2026年3月12日、人の動きと心理状態を予測する独自の「人間系世界モデル」を活用し、人の不安を定量的に推定してロボットを先回り制御するフィジカルAI(人工知能)技術を世界で初めて開発したと発表した。2027年度中の実用化を目指す。

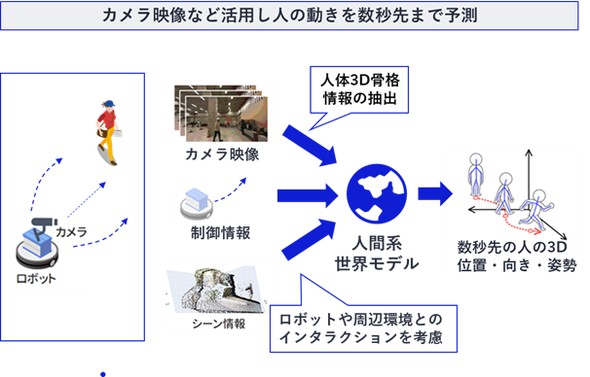
同技術は、ロボットに搭載したカメラの映像と制御情報から、周囲にいる人の3D(3次元)骨格情報や位置関係を解析する。独自の予測モデルにより、ロボットの挙動や周辺環境の変化が人に与える影響を考慮しながら、対象者の次なる動作を高精度に推定する仕組みだ。これにより、ロボットが急に接近して人に心理的負担を強いるような事態を回避できる。
心理状態の推定については、ロボットとの距離や姿勢の変化に応じて人が感じる不安を調査した結果とロボットの走行データをAIに学習させて、不安の程度を定量的に推定する予測モデルを独自に開発した。ロボットが接近した際に人が感じる不安の程度をリアルタイムで推定できる。

同技術により、ロボット導入時にロボット専用の走行コースを設けたり、人とロボットのエリアを分離したりする必要がなくなるため、より自由度の高い効率的な運用が可能になる。NECは、ロボット導入を促進することで、労働力不足の解消や生産効率の向上に寄与する。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 CES 2026でも過熱する「フィジカルAI」、バズワードを脱して本格的なトレンドへ
CES 2026でも過熱する「フィジカルAI」、バズワードを脱して本格的なトレンドへ
2025年後半から日本国内でもバズワードとして取り上げられてきた「フィジカルAI」。その主戦場は日本が得意とする自動車とロボットであり、2026年はこのフィジカルAIが本格的なトレンドとして定着していく年になるだろう。「CES 2026」でもフィジカルAIに向けた新製品の発表が相次いだ。 黒船「フィジカルAI」襲来 日本におけるヒューマノイド開発の最適解とは
黒船「フィジカルAI」襲来 日本におけるヒューマノイド開発の最適解とは
アールティが、産業技術総合研究所、川田テクノロジーズ、川崎重工業などと共同で「フィジカルAI勉強会」を開催。ヒューマノイドの実用化に必要不可欠な技術としてフィジカルAIという言葉そのものや技術成熟度への認識については混乱が見られる中、今回の勉強会は現時点でのフィジカルAIの捉え方を共有することを目的に開催された。 三菱電機と燈が目指す暗黙知のデータ化、現場で使えるフィジカルAI
三菱電機と燈が目指す暗黙知のデータ化、現場で使えるフィジカルAI
三菱電機と燈は「協業に関する戦略発表会」を開催。AI活用による協業戦略について説明した。三菱電機の持つ現場の知見や制御技術と、燈の高度なデジタルツインやAI技術を融合し、フィジカルAIの実装を加速させる。 AWSは信頼性への投資に注力 フィジカルAI開発を支援する新たなプログラムも発表
AWSは信頼性への投資に注力 フィジカルAI開発を支援する新たなプログラムも発表
AWSジャパンは、同社の投資戦略に関して説明するとともに、フィジカルAIの開発を支援する「フィジカルAI開発支援プログラム」を提供すると発表した。 日立は世界トップのフィジカルAIの使い手へ、「HMAX」は2030年度までに2万件受注
日立は世界トップのフィジカルAIの使い手へ、「HMAX」は2030年度までに2万件受注
日立製作所はフィジカルAIを中心とした同社のAI戦略アップデートの方向性について説明。フィジカルAIの適用を自社内で先行的に進めることで「世界トップのフィジカルAIの使い手」を目指す。 フィジカルAI実現へ、NVIDIAと富士通がチップからサービスまでAIインフラで協業
フィジカルAI実現へ、NVIDIAと富士通がチップからサービスまでAIインフラで協業
富士通とNVIDIAは、AIエージェントを統合したフルスタックAIインフラストラクチャの構築を目指し、戦略的協業を拡大する。フィジカルAI領域や量子コンピューティング領域を重点領域とし、共同でAIコンピューティング基盤の開発や、ユースケースの創出などに取り組む。