ニュース
無人惑星探査車のシャシー形状の変化からスリップ状態を検知可能に:ロボット開発ニュース
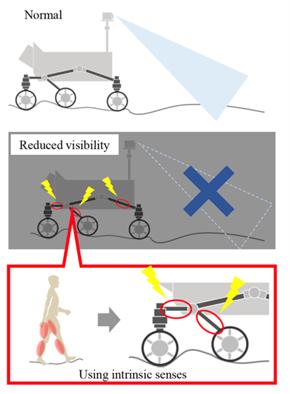
芝浦工業大学は、無人惑星探査車のシャシー形状の変化からスリップ状態を検知するシステムを開発した。人間の筋肉から着想を得たシステムで、より精度の高いスリップ検知を可能にする。
芝浦工業大学は2023年11月17日、無人惑星探査車(無人ローバー)のシャシー形状の変化からスリップ状態を検知するシステムを開発したと発表した。
同技術は、人間の筋肉が筋線維の張力変位を利用して自身の走行状況を検知している点に着想を得て、より精度の高いスリップ検知を可能にしている。ひずみとして現れるローバーのシャシーの形状変化を、ひずみの変位とひずみの振動変化に分類し、変位データは核鎖線維解析で、ひずみ速度は核袋線維解析で分析した。
核鎖線維の分析では、鉛直方向とローバーの進行方向に働く力が、ひずみによって変化することが分かった。これにより、ひずみの変位から、ローバーの走行状態を示すことを可能にした。
核袋線維の分析からは、ひずみの振動変化率がローバーの滑りの程度と走行状態の変化を測定できることを発見。ローバーの状態をリアルタイムで判断しながら、スリップ事故を回避する操作が可能となった。
同研究では、システムに岩や石などの環境障害物を検出する能力も組み込まれており、ローバー操作の安全性と効率を高める可能性が示されている。また、移動する物体のセンシングに生物学的要素を取り入れる有用性を示しており、無人航空機や自動運転車にも応用できる。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 月面ローバー技術と超音波モーターで不整地でも長時間動くAMRを――Piezo Sonic
月面ローバー技術と超音波モーターで不整地でも長時間動くAMRを――Piezo Sonic
月面探査ローバーの研究開発で培った知見と独自の超音波モーター「ピエゾソニックモータ」を活用した搬送用自律移動ロボット「Mighty」を手掛けるPiezo Sonic 代表の多田興平氏に開発経緯やビジョンについて聞いた。 ispaceが新開発の小型月面探査車を公開、ミッション2に向け再起
ispaceが新開発の小型月面探査車を公開、ミッション2に向け再起
ispaceが民間月面探査プログラム「HAKUTO-R」のミッション2で用いる新開発の小型月面探査車の最終デザインを公開。ミッション1で得た経験とデータを基にミッション2の月着陸船の開発プロセスを改善するとともに、再起の意味を込めてランダーを「RESILIENCE」と名付けた。 トヨタと三菱重工が月面探査で協力、走行技術から再生型燃料電池まで
トヨタと三菱重工が月面探査で協力、走行技術から再生型燃料電池まで
トヨタ自動車と三菱重工は、有人与圧ローバや月極域探査計画向けLUPEXローバの開発状況を発表した。両社は業務提携し、2024年に打ち上げのLUPEXローバの開発成果を、2029年打ち上げ予定のルナクルーザーにも生かす。 シャクトリ虫型ロボットアームによる月面作業の設計検証試験が完了
シャクトリ虫型ロボットアームによる月面作業の設計検証試験が完了
GITAI Japanは、宇宙ロボットの作業性を高めるために、シャクトリ虫型ロボットアーム「GITAI IN1」を開発し、JAXA相模原の模擬月面環境における試験で、NASAの技術成熟度レベル「TRL 3」を満たすことを確認した。 はやぶさ2から小惑星に降り立つローバー、「ミネルバ2」の仕組み(前編)
はやぶさ2から小惑星に降り立つローバー、「ミネルバ2」の仕組み(前編)
2014年12月に打ち上げられた小惑星探査機「はやぶさ2」に搭載された、ローバー(探査車)が「ミネルバ2」だ。小惑星に降り立つ重要なミッションを持ったミネルバ2の全貌に迫る。 車輪なしでどうやって移動する?ローバー「ミネルバ2」の仕組み(後編)
車輪なしでどうやって移動する?ローバー「ミネルバ2」の仕組み(後編)
小惑星リュウグウを目指す「はやぶさ2」に搭載された、ローバー(探査車)が「ミネルバ2」だ。小惑星の表面に降り立ち、調査する使命を持ったミネルバ2の全貌に迫る。