MR技術も生かした「AGVの目」、デファクトスタンダードを狙うキヤノンの自信:無人搬送車(1/2 ページ)
労働人口減少が進む中で工場でもAGVへの注目が高まっている。その中で「AGVの目」に新たに参入したのがキヤノンだ。新たに投入した映像解析ソフトウェア「Vision-based Navigation System for AGV」のポイントについてキヤノンに聞いた。
労働人口の不足が加速する中、工場内でも人手作業を自動化しようとする動きが広がりを見せている。その中で、人手が数多く残る搬送作業の自動化で大きな期待を集めているのが、自律型のAGV(無人搬送車)である。こうした中で自律型AGV分野に新たに参入する動きも広がりを見せているが、2020年8月5日に新たに「移動ロボットの眼」となる映像解析ソフトウェア「Vision-based Navigation System for AGV」を開発し日本電産シンポの自律型AGVに提供を開始したと発表したのがキヤノンである。
キヤノンでは創業以来、光学技術を中心とした映像技術の開発に取り組んできたがこれらの映像技術に加え、MR(Mixed Reality、複合現実)技術などを組み合わせ、従来以上に広範囲を高精度で認識し、柔軟性の高い経路案内を実現する技術を作り上げたという。同技術の事業企画を担当したキヤノン イメージソリューション事業本部 イメージソリューション第二事業統括部門 イメージソリューション22事業推進センターの岡本和俊氏と、開発を担当したキヤノン デジタルビジネスプラットフォーム開発本部 ソフトウェア第三開発センター 部長の中原鉱一氏、同主幹の小竹大輔氏にポイントを聞いた。
広い範囲の空間認識と現実情報の地図への反映が特徴
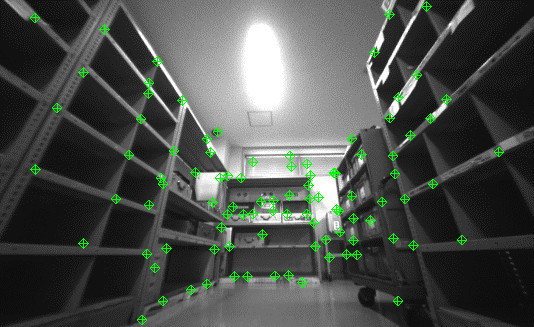
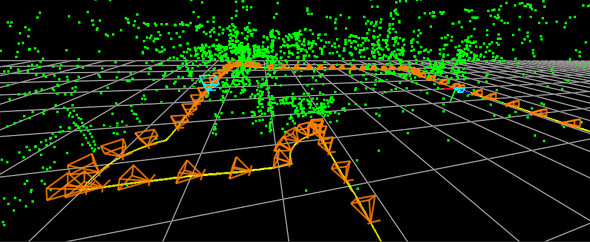
キヤノンが提供を開始した「Vision-based Navigation System for AGV」は、ステレオカメラの映像を基に、空間を認識しポイントとなる特徴点を抽出し、地図データを照らし合わせて、自車の位置を推定し、経路を判断する技術である。映像で自己位置推定と環境地図作成を同時に行う「Visual SLAM(Simultaneous Localization and Mapping)技術」を採用し、試走をするだけで自動で地図作成を行える利点を持つ。AGVに採用すると、レイアウト変更が多い工場現場でもレールやテープなどのガイドを用意しなくても、簡単に自律走行ができる点で注目されている。
「Vision-based Navigation System for AGV」では、この「Visual SLAM」技術に加え、20年以上研究開発を行ってきたMR技術を採用している点が特徴だ。MR技術では人がヘッドマウントディスプレイ(HMD)を装着し、その視点の位置の動きに合わせて、表示する3D CG映像を位置を合わせて表示する技術が求められる。これらの構造物をマーカー代わりに使う空間の認識技術や、地図との位置合わせ技術を新技術に生かし、従来以上に広範囲で高精度な空間認識と経路判断が行えるようになったという。
既に「Visual SLAM」技術は、民生機器などで幅広く採用されているが、新技術の差別化のポイントについて小竹氏は違いを強調する。
「現在採用されている『Visual SLAM』は多くの場合で狭い空間を対象としたものとなっており、広い範囲でモノを運ぶ可能性について検討されたものは少ない。今回開発した技術はMRなどの技術を加えることで、広い範囲の空間認識を正確に行えるため、AGVなど広い空間で使う用途に最適化しているという点がポイントだ」(小竹氏)
さらに、工場などでは、レイアウト変更などが頻繁に行われるケースも多いが、これらへの対応を強化しているという点も特徴となる。小竹氏は「工場ではレイアウトが一定ではなく、生産品目や改善活動などによる変更に伴って経路の変更が必要になる。そのため、地図を1度作ってそれを使い続けるというものではなく、AGVが移動している中で地図情報と異なる現実空間を認識した場合には、地図情報を再度書き換えるというような機能を加えている。ただ、これが可能なのも、空間を高精度に認識できることが前提としてあるために行えることだ」と強みについて語っている。
Copyright © ITmedia, Inc. All Rights Reserved.