外観検査用途として手首関節モジュールの量産を開始:FAニュース
NTNは、自動車部品や産業機械部品の外観検査向けに、手首関節モジュール「i-WRIST」を2018年8月より量産開始する。独自のリンク機構を採用しており、外観検査の高速化、省スペース化を図る。
NTNは2018年6月22日、自動車部品や産業機械部品の外観検査向けに、手首関節モジュール「i-WRIST」を同年8月より量産開始すると発表した。独自のリンク機構を採用し、外観検査の高速化、省スペース化に対応。グリス塗布装置、洗浄装置、塗装装置など、人手作業の代替用途で展開していく。
同社は、2012年に「パラレルリンク型高速角度制御装置」として同製品を発表し、以来、用途ごとのニーズに応じて改良を重ねてきた。今回、従来のパラレルリンク型高速角度制御装置の稼働範囲を拡大し、半球面全方向に対して任意の位置に高速で位置決めできる装置を開発。名称もi-WRISTに改めた。
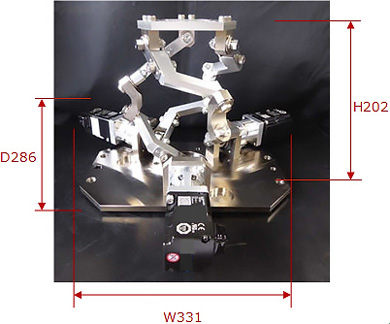
i-WRISTでは、独自のリンク機構を採用し、小型ながら広い可動角度範囲を確保。人間の手首と同様の動きで、垂直多関節ロボットやパン・チルト機構が苦手な細かな位置(角度)変更も高速で行える。
最大折れ角は従来の45度から90度まで拡大し、人が行っていた複雑形状や半周面の外観検査作業を置き換えることができる。ワークの形状やサイズ、画像処理システムの処理速度にもよるが、8秒で60カ所の外観検査に対応するという。
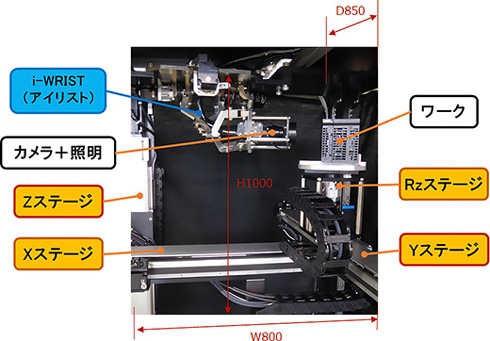
また、i-WRISTとXYZステージを組み合わせた構成にカメラや照明を搭載すると、対象検査物に対して真横からカメラ撮影ができる。さらに、対象ワークを回転させるRz軸の追加により、XYステージのストロークを短縮し、装置全体を小型化できる。
リンク機構内部には、カメラやケーブルを配置でき、旋回動作を繰り返してもケーブルがねじれることがない。同社が開発した専用コントローラーと専用コンソールを使用することで、作業者は複雑な数値演算をすることなく、容易にティーチング操作ができる。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 ロボット普及の課題となるハンド、人間の手の構造を「からくり」で再現
ロボット普及の課題となるハンド、人間の手の構造を「からくり」で再現
NEDOとダブル技研、都立産業技術高専は人間の手の構造を模倣することで、簡単な制御でさまざまなモノを安定的につかめるロボットハンド機構を開発した。 気持ち悪いけどすごい! “カメレオンの舌”でつかむロボットハンド
気持ち悪いけどすごい! “カメレオンの舌”でつかむロボットハンド
ドイツのFestoは、ハノーバーメッセ2015において「カメレオンの舌」をモチーフとしたロボットハンドを紹介した。形状の異なるものや柔らかいものを1つのハンドでつかめるのが特徴。 協働ロボット、ロボットシステムに残された課題と未来
協働ロボット、ロボットシステムに残された課題と未来
協働ロボットを現場で活用するのにどのような工夫が必要か――。ロボット技術の総合展示会「2017国際ロボット展」では、ロボットメーカーおよびユーザー企業によるパネルディスカッション「ロボットフォーラム2017」が実施され、協働ロボットの意義について語った。 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
2016年は人工知能関連技術が大きな注目を集めて「機械が人間の仕事を奪う」という議論が大いに盛り上がりを見せた。こうした一方で2017年には「現場」において、こうした動きと逆行するように見える「人とロボットが協力して働く世界」が始まりを迎える。 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。