ニュース
協調しながら最適な動作を実行する建築施工ロボットを発表:ロボット開発ニュース
テムザックと積水ハウスは、相互コミュニケーションによる協調作業で、効率的に天井石こうボード貼りを行う建築施工ロボット「Carry」「Shot」を共同開発した。施工データに基づき、協調しながら、最適な動作を自律的に判断できる。
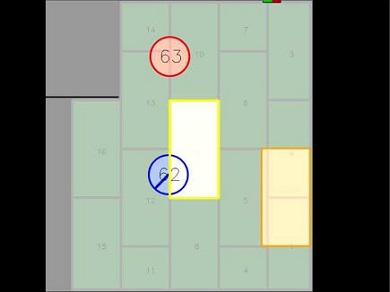
テムザックは2018年5月16日、相互コミュニケーションによる協調作業で、効率的に天井石こうボード貼りを行う建築施工ロボット「Carry」「Shot」を発表した。Carryが天井石こうボードの位置決定と運搬を、Shotがビス打ちと固定を主に担う。積水ハウスと共同開発した。

2台のロボットは、あらかじめ読み込んだ施工データに基づき、作業手順や互いの位置情報などを交換し、協調しながら最適な動作を自律的に判断する。例えば、Carryが天井の施工箇所の正確な位置を認識し、それに合う石こうボードのサイズを人に伝える。Shotには施工位置やビス打ちの位置をCarryが伝え、2台のロボットと人が協調して高精度な施工を実施する。
大きなボードを持ち上げたCarryの視界が悪くなり、運搬や天井の位置合わせが困難になった場合には、Shotが代わりに位置情報を確認しながら適切な位置をCarryに指示する。双方が衝突しそうになった場合、現在の互いの作業内容や位置を確認し、どちらが回避するのが最適かをロボット同士で判断して実行する。

両ロボットとも分解して運搬し、現場で短時間で組み立てることができる。そのため、大型の建築現場だけでなく、個人住宅の施工場所などにも対応する。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。 コンクリートの鉄筋結束作業を自動化するロボット、鉄筋をレールに見立てて移動
コンクリートの鉄筋結束作業を自動化するロボット、鉄筋をレールに見立てて移動
千葉工業大学と大成建設は、建造物に用いるコンクリートの骨組みとなる鉄筋を自動で結束する自律型鉄筋結束ロボット「T-iROBO Rebar(ティーアイロボ・リバー)」を開発。2018年度から、本格的に現場に導入し、鉄筋結束作業の省人化/効率化による鉄筋工事の生産性向上を目指す。 造林作業向けアシストスーツと“後ろから乗る”電動車いす、国際ロボット展で披露
造林作業向けアシストスーツと“後ろから乗る”電動車いす、国際ロボット展で披露
NEDOは「2017 国際ロボット展(iREX2017)」に出展し、林業用アシストスーツの試作品「TABITO-03」や、新型電動車いす型ロボット「RODEM(ロデム)」などを展示する。 油圧ショベルなどの建設機械を遠隔操縦できる人型ロボットを開発
油圧ショベルなどの建設機械を遠隔操縦できる人型ロボットを開発
カナモト、アスラテックなど4社は、建設機械を操縦できる人型ロボット「DOKA ROBO 3」を開発した。油圧ショベルなどの建設機械の運転席に設置してオペレーターが遠隔操作することで、機械の操縦が可能になる。 世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決
世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決
NEDOと慶應義塾大学は、身体感覚を伝送可能な双腕型ロボット「General Purpose Arm」の開発に成功した。「世界初」とする力触覚に応じた制御により、力加減を調節し多様な作業を柔軟に行えることが最大の特徴。「固くて柔らかい」という矛盾した制御が必要な力触覚はどのように実現されたのか。