「世界初」空気圧で滑らかに動く手術ロボット、大学発ベンチャーが発売:医療機器ニュース(2/2 ページ)
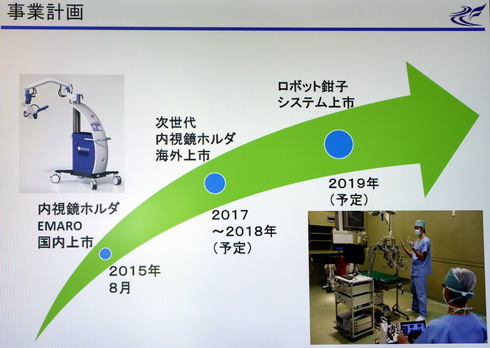
大学発ベンチャーで先進医療機器を開発するリバーフィールドが、小型・軽量で操作性に優れた内視鏡ホルダーロボット「EMARO(エマロ)」を発表。人間のように柔らかな操作が行える空気圧制御によって、執刀医が助手の補助無しで内視鏡を思うがままに操れるという。
次の目標は“日本版ダヴィンチ”
さらにリバーフィールドでは、今回のEMAROで採用された超精密空気圧制御技術を生かし、空気圧駆動型の鉗子(かんし)を有する手術支援ロボットシステムを開発中だという。
アームで鉗子を操る手術支援ロボットとして有名なダヴィンチ(da Vinci Surgical System)など従来の手術支援ロボットシステムでは、電動駆動のアームが用いられている。一方、EMAROに採用された空気圧駆動は産業用ロボットでの掴む動作にも使われているように、動きが非常に柔らかく滑らかで、しかも安全性が高いという利点がある。

一方で、電動駆動に比べて空気圧は細かい制御(位置決め)が難しいとされてきた。その点についてリバーフィールド社長の原口大輔氏は、「空気圧駆動でも0.1mm単位の精度に対応している。これは手術での精密操作に十分な精度になっている。この0.1mm単位の精度は(鉗子ロボットよりも精密操作が必要ない)EMAROですでに実現している」と、細かい制御にも自信を見せる。
そして開発中の手術支援ロボットシステムの最大の特長は、力センサーを用いることなく鉗子にかかる力を空気圧を通じて検出し、執刀医にフィードバック(力覚)できることだ。鉗子先端における接触力を、鉗子根元部の空気圧アクチュエータの差圧から推定。執刀医はアームの先端が患部に触れた感覚を知ることができる。
「ダヴィンチなど従来の電動駆動型手術支援ロボットシステムを使った医師から『もっと手先の感覚を出せないものか』という要望が数多くあった。力覚があれば、自分の手で直接手術しているような感覚を持てるので、手術の精度がより高くなる。2019年には空気圧制御のロボット鉗子システムを上市したい」(川嶋氏)。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 次世代手術ロボットを手掛ける東工大発ベンチャー、2億円の資金を調達
次世代手術ロボットを手掛ける東工大発ベンチャー、2億円の資金を調達
東京工業大学から誕生したベンチャー企業であるリバーフィールド(RIVERFIELD)が、大手ベンチャーキャピタルのジャフコから約2億円の資金を調達した。リバーフィールドは、空気圧による高精度の制御技術を利用する次世代の手術支援ロボットの開発を手掛けている。 手術器具の死角をARで可視化、早稲田大学が鉗子を透明化する技術を開発
手術器具の死角をARで可視化、早稲田大学が鉗子を透明化する技術を開発
早稲田大学が、内視鏡手術中に鉗子(かんし)の死角となる領域を透明化する可視化技術を開発。画像処理によって、手術器具があたかも透明になったかのような拡張現実感(AR)を実現している。 長時間の手術で医師の手を疲れさせない、モーター不使用の手術支援ロボット
長時間の手術で医師の手を疲れさせない、モーター不使用の手術支援ロボット
デンソーは、手術時に医師の腕を支え、生理的に生じる手のふるえや疲れを軽減する手術支援ロボット「iArmS(アイアームス)」の販売を開始した。