いかに速く安定して目標値に到達させるか:無償ソフトで技術計算しよう【制御工学応用編】(3)(2/2 ページ)
【制御工学応用編】では、制御系の応答性や安定性を評価する方法とPIDコントローラーの設計について説明する。今回は、PIDコントローラー付バネ・マス・ダンパモデルを元に、指示された目標値に「いかに早く安定して」到達させるかについて解説する。
次に、入力した結果から回帰式を作成します。データ→データ分析とすると、分析ツールの一覧が表示されるので、回帰分析を選択してOKをクリックすると、図3に示す回帰分析の条件設定画面が表示されます。
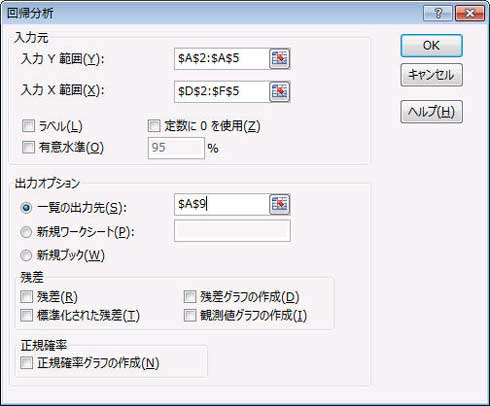
ここで、入力Y範囲にTr以下のセル、入力X範囲にKp,ki,kdの組み合わせを選択し、結果の出力先のセルを指定して、OKをクリックすると、図4に示すような回帰分析結果が得られます。
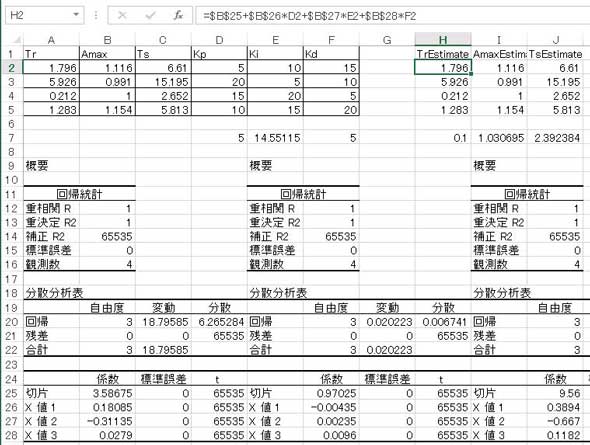
このうち、切片が定数項、X値1がkpの、X値2がkiの、X値3がkdの回帰係数となります。以上をY範囲をAmax以下のセル、Ts以下のセルとして繰り返すと、Tr、Amax、Tsの回帰係数が得られます。図4に示すように、それぞれの回帰係数とkp,ki,kdの値を組み合わせて回帰式を作成します。今回はソルバーで最適解を探索させるために、セルD7~J7にもコピーして回帰式を用意します。
回帰式が用意できたら、ソルバーで最適解を探索させます。データ→ソルバーとクリックすると、図5に示すソルバーの設定画面が表示されます。

目的セルの設定欄で、Tr欄のH7セルを選択し、目標値は最小値のラジオボタンをクリックして選択します。変数セルの変更欄は、kp,ki,kd欄のセル範囲D7〜F7を選択します。次に制約条件を設定します。追加ボタンをクリックし、表示される画面で、図5のように順に設定します。>=5、<=20は、kp,ki,kdの設定範囲です。H7>=0.1は、立上り時間が0とか負といった非現実的な値となるのを防ぐためです。I7<=1.1は行過ぎ量の目標条件で、J7<=3は整定時間の目標条件です。
以上の設定を行い、解決ボタンをクリックすると、図6に示すように、最適解の組み合わせと、予測結果が得られます。
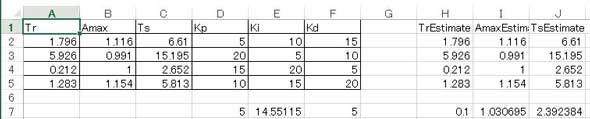
最適な組み合わせとして、kp=5、ki=14.6、kd=5が得られたので、確認のため、この条件でex511.mを動作させると、図7に示す結果が得られます。
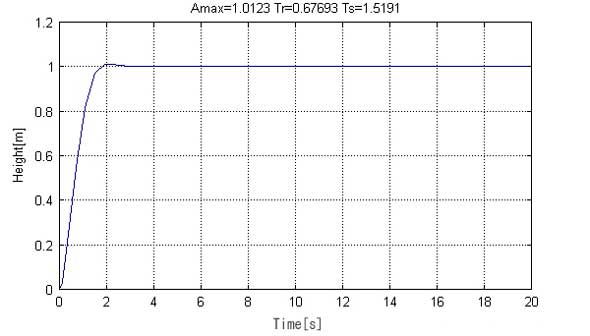
図8に【制御工学基礎編(1)】で紹介した適当に設定した結果を参考までに示します。
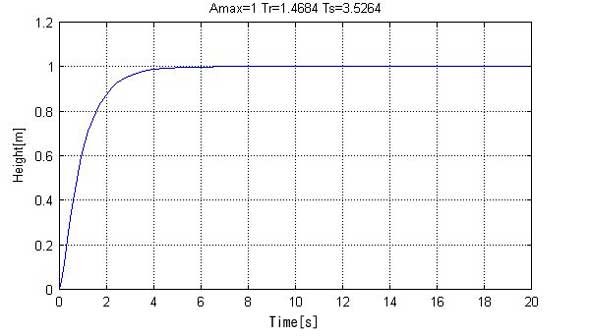
最適な組み合わせでは、立ち上り時間は、1.5秒から0.7秒に短縮されています。また、整定時間も3.5秒から1.5秒に短縮され、速応性・安定性ともに改善されていることが分かります。
制御工学編は今回で終了です。企画の都合で制御工学の一部しか紹介できませんでしたが、FreeMatにより結果を可視化することで、理解しやすくなることを実感していただけたら幸いです。
参考文献
- 「MATLABハンドブック」小林一行著、秀和システム刊
- 「はじめてのFreeMat」赤間世紀著、工学社刊
- 「制御工学」豊橋技術科学大学制御工学教育連携プロジェクト著、実教出版刊
筆者紹介
伊藤孝宏(いとう・たかひろ)
1960年生。小型モーターメーカーのエンジニア。博士(工学)。専門は流体工学、音・振動工学。現在は、LabVIEWを使って、音不良の計測・診断ソフト、特性自動検査装置などの開発を行っている。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 無償の工学計算ソフト「FreeMat」をインストールしよう
無償の工学計算ソフト「FreeMat」をインストールしよう
無償の工学計算ソフトでも、かなり高度な計算ができる! 今回はインストール編。工学計算の初心者もぜひチャレンジしよう。 数式を使わないで自動制御について教えるよ
数式を使わないで自動制御について教えるよ
数式がいっぱい出てくる制御理論の習得に挫折した人は多いカモ。制御のエッセンスだけなら数式がなくても理解できる! 組み込みソフト開発の“主役”は誰に?
組み込みソフト開発の“主役”は誰に?
かつて、組み込み機器用ソフトウエアの開発は、それを専門とする技術者の手で行われていた。しかし、現在は、モデルベース設計ツールをはじめとした設計の抽象度を高めることが可能なツールを利用することで、システム設計者やドメインエキスパートであっても、組み込みソフトウエアを開発できる環境が整いつつある。本稿では、代表的なモデルベース設計ツールとその活用事例などを紹介した上で、組み込み用ソフト開発の現状についてまとめる。 無償の工学技術計算ツール「Mathcad Express」を使ってみた
無償の工学技術計算ツール「Mathcad Express」を使ってみた
設計計算や制御計算など高度な活用から、日常使いのローエンドな活用まで幅広い、無償の工学技術計算ツール「PTC Mathcad Express」を使ってみた。「単位をごっちゃにして数式を書いても計算してくれる」など便利機能がいろいろある。仕事での面倒くさい計算が楽しくなる、かも!?