「何これ、超速い!」――キミは知っているか、小さくて賢いロボット「マイクロマウス」を:マイクロマウスで始める組み込み開発入門(1)(3/3 ページ)
1980年から30年以上継続されているロボットコンテスト「全日本マイクロマウス大会」をご存じだろうか? 小さくて賢いロボット「マイクロマウス」を題材に、組み込み開発の基本を楽しく身に付けよう!
このように、技術者にとって魅力あるマイクロマウスですが、電気・機械・ソフトウェアを全て自作するため、技術的なハードルが高く、「経験値を重ねている参加者が有利だ」といわれてきました。
しかし、近年、インターネットを通じて参加者が技術情報を交換するようになり、初心者も経験者のデータを参考にして、スタートできる環境が整ってきました。そのため、最近では、大学生を中心とした学生の参加が増加し、大会でも若手の活躍が目立ち始めています。
マイクロマウスキット「Pi:Co Classic」で組み込み開発を始めよう!
プログラミングしていると、機械や電気回路の知識がもっとあればいいのにと思うことがあるんだよね。だから、今のうちに勉強しておこうと思ってさ。
さすが、北上センパイ! でも、肝心のロボットを作ったことがあるんですか?
実はそれがないんだよね。だから、組み立てキットから始めてみようと思ってるんだ。
北上くんは、やる気はあるものの、どうやらメカや電気回路設計の経験がないようです。
大学時代であれば、ロボコン部に所属して、機械系や電子系の学部のメンバーと力を合わせてロボットを作りながら、お互いに技術を学ぶことができたでしょう。しかし、社会人になってしまうと、なかなかそうした機会は得られません……。
やはり、本当に機械設計・電子回路・ソフトウェアに関する知識を全て身に付けたいのであれば、自作するのが一番でしょう。しかし、北上くんのようにソフトウェア以外の知識が乏しい場合、いきなりマイクロマウスを自作するのはハードルが高過ぎます。
そこで、北上くんはマイクロマウスキットを購入し、まずは得意分野のソフトウェアでマイクロマウス大会に参加し、少しずつ電気回路や機械設計にも手を出していこうという作戦を採ろうとしているのです。
さて今回、北上くんがネットで見つけたのは、クラシック競技ルールに適合している組み立てキット「Pi:Co Classic」です。これならば、電気回路の知識がなくとも、ハンダ付けさえ頑張れば何とかなりそうです。ちなみに、Pi:Co Classicは、基板がユニット化されているので、将来的に自作回路に差し替えることも可能です。
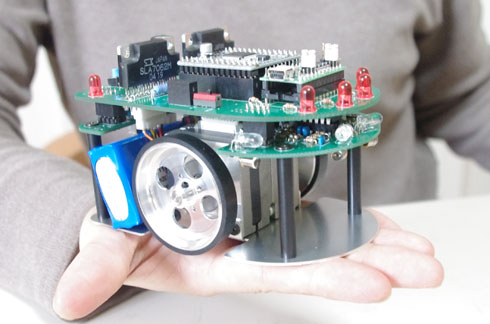
画像3 「Pi:Co Classic」。サイズは120mm×73mm×80mm、重さは約460g。マイコンはルネサス エレクトロニクスのSH/Tinyシリーズ「SH7125F」を搭載。リチウム電池で動作する


| 関連リンク: | |
|---|---|
| ⇒ | Pi:Co Classic(アールティロボットショップ) |
本連載の目的
楽しみながら、組み込み開発の基本を身に付ける……かぁ。ワタシもやってみようかなぁ〜。
おっ、いいんじゃない!
でも、1人じゃできそうにないからなぁ。北上センパイ!! ワタシに教えてくれますか?
うん、もちろん。ボクも勉強しながらになるから、一緒に頑張っていこう!
ということで、本連載では、マイクロマウス(Pi:Co Classic)を組み立てて、まずは、3×3区画の迷路内を自律走行させるところまでを、北上くん&えみちゃんと一緒に学んでいきます。
なお、本連載の中では、マイクロマウスの神髄といえる“迷路探索と最短走行”の詳しい解説には踏み込みません。迷路探索の作り込みは、ロボット本体ではなく、不具合・問題の切り分け/原因特定が容易なシミュレータで開発した方がよいからです。さらに、もう一方の最短走行については、迷路探索プログラムを組んだ後に取り組むべき課題だといえます。
本連載では、初心者にとって最初の壁となる、「センサーを使って壁の有無を判断し曲がる」にチャンレンジしたいと思います。これが全ての基本です。
そして、走るようになって、すぐに迷路探索やスピードアップ(最速走行)に取り組むのではなく、より確実に長時間、自律走行できるようにソフトウェアと機体を調整する方法を紹介していきます。
スピードと信頼性はトレードオフの関係にあります。やみくもにスピードアップを目指すのではなく、きちんと機体を調整して、ソフトウェアを作り込んで、自律走行の時間を延ばし、信頼性を高めていくべきです。これがゴール地点へ到達できるマイクロマウスを作るための第一歩です。(次回に続く)
ロボット/ロボット開発 コーナー

Copyright © ITmedia, Inc. All Rights Reserved.