次は「サッカー」「ダンス」だ!――「神戸こどもロボットクラブ」で二足歩行プログラミング体験:ロボット開発リポート(1/2 ページ)
2012年3月24日、神戸市機械金属工業会が、神戸RT(ロボットテクノロジー)構想の拠点「神戸ロボット工房」に新設された「神戸こどもロボットクラブ」に、二足歩行ロボット「VariBo」を20体寄贈した。本稿では、神戸RT構想と、贈呈式後に行われたロボット工作教室の模様についてリポートする。
神戸RT構想とは
神戸RT(ロボットテクノロジー)構想は、1)ロボット開発を通じた産学民官の連携によるモノづくり技術の高度化と市内産業の振興、2)次世代を担う子どもたちにロボットを通じた夢とモノづくりの楽しさを伝える、3)ロボットによる豊かで安全・安心な街づくりの実現の3つを目的としている。
本構想の原点は、1995年の阪神・淡路大震災の経験から、レスキューロボット・レスキューシステムの研究開発に向けてIRS(国際レスキューシステム研究機構)が誕生したことにある。その後、本構想の中核機関として、新産業創造研究機関(NIRO)内に「神戸ロボット研究所」が発足し、神戸市およびその周辺の大手企業を中心に、大学・高専をはじめとしたロボット関係の研究者が参画。神戸市と連携して、ロボットの研究開発、ニーズの掘り起こし、開発ノウハウの蓄積を進めてきた。


そうした取り組みの一環として「神戸ロボット工房」が2010年に誕生した。ここでは、将来の神戸のモノづくり産業を支える人材育成を目的に、小中学生向けの工作教室の実施や、ロボットの常設展示を行ってきた。そして、この(2012年)春から新たに「神戸こどもロボットクラブ」の会員募集を開始し、「こどもロボット人材講座」を月1〜2回、夏休み期間中に集中講座として開催していくという。


プログラミング基礎〜おじぎモーション
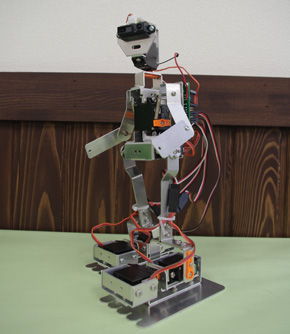
今回(2012年3月24日)、寄贈された「VariBo(ヴァリボ)」は、身長約28cm、全身9自由度の二足歩行ロボットだ。地元企業のビー・エル・オートテックと姫路ソフトワークスが製作したVariBoを、神戸市機械金属工業と会員企業がカスタマイズし提供した。

贈呈式の後、24、25日の2日間にわたり、VariBoを用いた「ロボット工作教室」が開催された。今回は小学3〜5年生までの8人が、スライドで板金加工の工程説明を受けた後、VariBoのプログラミングを学んだ。

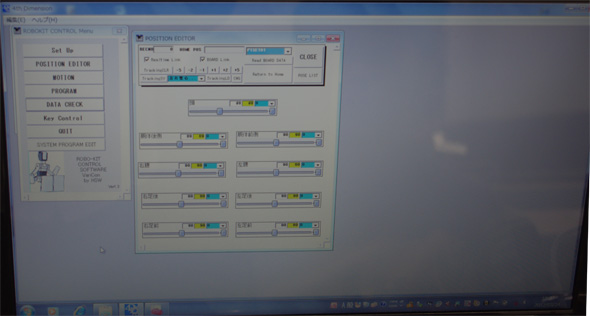
VariBoのモーション作成と操作には、4Dデータベースエンジン上で動く4D languageで制作された専用アプリケーション「VariCon」を使用する。
VariConに表示されるスライダーを左右に動かせば、対応しているモータが動き、ロボットのポーズがリアルタイムで変わる。ユーザーはパラパラ漫画のように、ロボットのポーズを複数作る。そうすればモーションを実行する際に、ポーズとポーズの間はプログラムが自動生成でつなげてくれる。そのシステムのおかげで、難しい知識が不要なまま、誰にでもロボットのモーションを作成できる。
子どもたちは、PCとロボットをシリアルケーブルで接続した後、初期設定を済ませ、ロボットのモーション作成に取り掛かった。
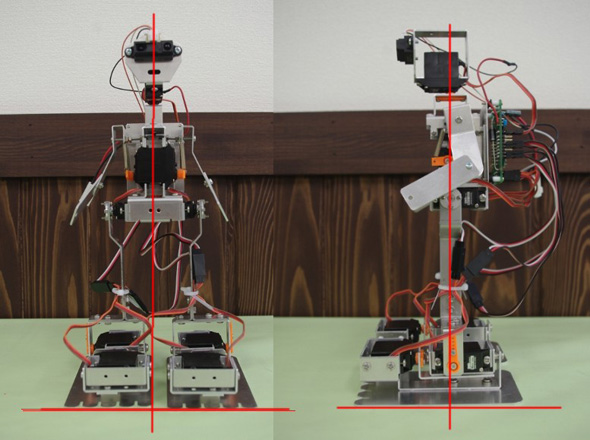
最初に必ず行わなければならないのが、ホームポジションの登録だ。これはロボットが“きをつけ!!”をしている状態だと考えればいい。このホームポジションが、これから作成する全てのモーションの基本となる。ここで姿勢がズレていると、歩行すらままならなくなるので慎重に作る必要がある。ポイントは、足裏が床面と水平であること、前面と背面どちらから見ても上半身が床に垂直に立っていることだ。
ホームポジションが完成すれば、いよいよモーションを作ってロボットを動かすことができる。まずはモーション作成手順を学ぶのを兼ねて、“おじぎ”モーションを作った。おじぎモーションは、左右への重心移動が必要ないため比較的カンタンだ。おじぎの姿勢として腰軸を45度前傾させたポーズを作成・登録し、
ホームポジション → 前傾ポーズ → ホームポジション
とつなげて再生すればいい。
Copyright © ITmedia, Inc. All Rights Reserved.