「あの現場で動けるロボットはQuinceしかない」〜原発ロボットを開発する千葉工大・小柳副所長(前編):再検証「ロボット大国・日本」(10)(2/2 ページ)
震災から1年――。今なお予断を許さない東京電力・福島第一原子力発電所の事故。この過酷な現場に投入されたのが、千葉工業大学 未来ロボット技術研究センター(fuRo)が開発したレスキューロボット「原発対応版Quince(クインス)」だ。本稿では、開発責任者でfuRo副所長を務める小柳栄次氏に、これまでの開発について、そして今後のレスキューロボットについて話を聞いた。
商品か、そうでないかの違い
テレビ中継で原子炉建屋の水素爆発の映像を見たとき、小柳副所長は「爆発で瓦礫が散乱している。あの中で動けるのはウチのロボットしかない」と直感したという。
福島原発への投入は米iRobot社の軍事ロボット「PackBot(パックボット)」の方が早かったが、PackBotはあんなに急な階段を上ることはできない。2階よりも上に行けたのはQuinceだけだ。それが最初から分かっていたから、「日本のロボットは一体何をやっているんだ!」という空気になったときも、焦りはなかった。「やれる人がやれることをやればいい」という気持ちだったという。
ただ、軍用に大量導入されているPackBot(iRobot社のWebサイトによると3600台以上)に比べ、日本のレスキューロボットはまだ研究室レベル。「実用化」という面では、大きな差がある。初動の遅れは、運用体制の違いでもあった(関連記事:「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告)。
「レスキューロボットは今まで、常に研究者がそばにいる状態で使われてきた。ところが今回は、研究者が現場(原発)に入れない。ある程度実用レベルのものになって、それから商品化されるまで、膨大なテストが必要になるが、その“手離れ”がいきなり来てしまった。そのための準備はまだできていなかったので、そこが難しかった」と、小柳副所長は振り返る。
ロボットを開発した研究者であれば、そのロボットの強さも弱さも熟知している。「こうすれば壊れる」と分かっているので、もし近くで見ていられれば、操縦者にいろいろとアドバイスすることもできる。しかし、原発には研究者が乗り込むことはできない。ロボットに関して専門知識がない人たちだけで運用しなければならないわけだ。「商品」であれば当たり前のことだが、レスキューロボットはまだその段階にはなかった。
「操縦者は、ロボットなら何でもできると過信してしまう。そういうところからやらないといけないと思うと、気が遠くなった」と小柳副所長。「自動車であれば、車種が違っても誰でも同じように運転できるが、ロボットの場合は、使う側にも専門知識が必要。そこが、普及してもう何十年もたつ自動車と、普及にはほど遠いロボットとの差だ。『これがレスキューロボットである』とは、まだとても自信を持って言えない」と語る。
しかし、そうは言っても、建屋の階段を上れそうなロボットはQuinceしかないのも事実。2011年3月半ばに東京電力側から初めて接触があり、それ以降、投入に向けた準備を開始。中部電力・浜岡原子力発電所での試験などを経て、1号機の投入にこぎ着けた。
追加投入する2号機と3号機
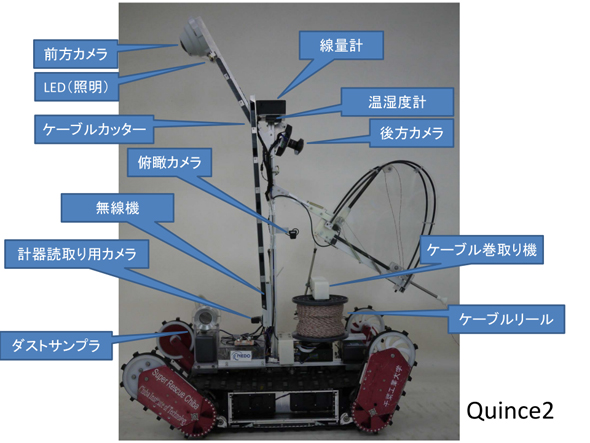
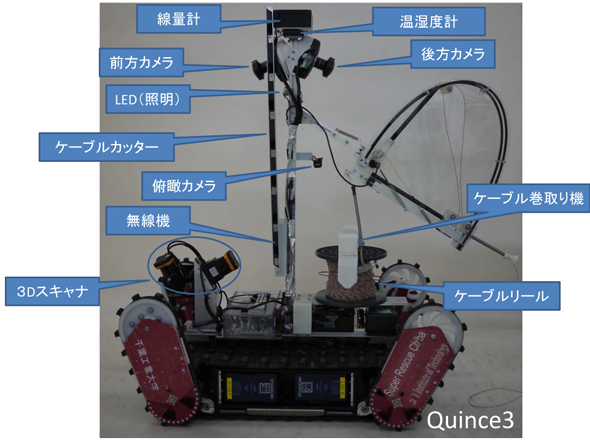
前述のように、1号機は帰還中に通信ケーブルが切れたことで、操縦不能になってしまったが、新たに投入された2号機と3号機には、そのための対策が考えられている。

この問題への対処としては、ケーブルそのものを丈夫にすることも考えられるが、そうするとケーブルが重くなってしまい、走破性能が下がる。軽くするためには、ケーブルが短くなってしまう。それにケーブルが切れないと、どこかに絡まってしまったときに、そこから身動きできなくなる恐れがある。いざというときは、切れてくれた方が都合がいい場合もあるのだ。
そういう理由もあり、新型機では1号機と同様の細いツイストペアケーブルを使用。その代わりに、通信ケーブルが切れても帰還できる方法を考えた。
今回、2台の新型機を用意したのはそのためだ。両機には無線LANも搭載されており、お互いの間で通信が可能だ。こうすれば万が一、通信ケーブルが切れたとしても、無事な方のQuinceをアクセスポイントとして、無線で操縦を続けることができる。基本的には2号機か3号機かのどちらか1台が探査に向かう運用となるが、もう1台を入り口で待機させておいて、ケーブル切断時に救助に向かわせる。無線が通じにくい建屋内でも、お互いが直線で見える範囲までたどり着ければ通信は可能だ。

その他、1号機の運用で得られたさまざまな知見を、新型機にはフィードバックさせた。通信ケーブルの巻き取りを自動化したり、ユーザーインタフェースを一新するなどして、操作性が向上。また、作業員の被ばくを軽減するために、キャリングハンドルを開発し(運搬がしやすくなる)、サイドカバーのネジも大きく扱いやすいものに変えた(手袋をしていてもバッテリーを短時間で交換できる)。
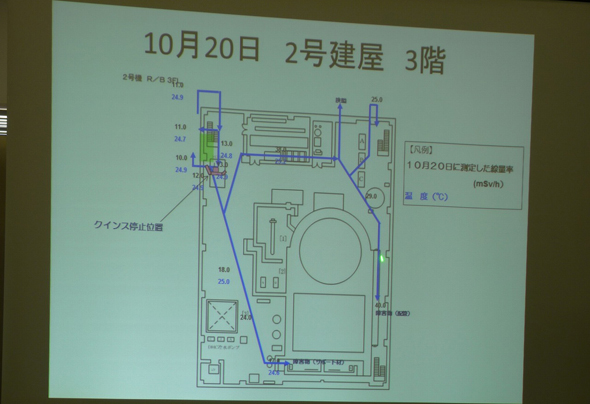
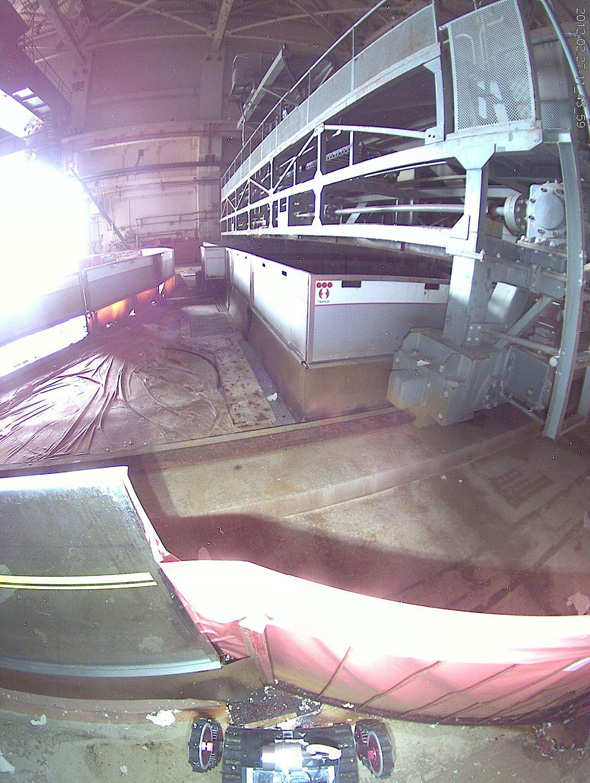
こうしたさまざまな改良が施され、2台の新型機は福島原発に向け旅立ち、2月27日、2号建屋の調査に再び投入された。翌28日の東京電力の報告によると、使用済み燃料プールから燃料を取り出す準備に向けた現場状況の確認(撮影)と現場の放射線量の測定に成功したという。

千葉工業大学のQuinceは残り1台のため、今後のことを考えると、これはもう使うことができない。そのため、小柳副所長は次に投入する新型ロボット「Rosemary(ローズマリー)」の開発を進めている。次回は、このRosemaryについて紹介するところから始めたい。(次回に続く)
ロボット/ロボット開発 コーナー

筆者紹介
大塚 実(おおつか みのる)
PC・ロボット・宇宙開発などを得意分野とするテクニカルライター。電力会社系システムエンジニアの後、編集者を経てフリーに。最近の主な仕事は「小惑星探査機「はやぶさ」の超技術」(講談社ブルーバックス)、「宇宙を開く 産業を拓く 日本の宇宙産業Vol.1」「宇宙をつかう くらしが変わる 日本の宇宙産業Vol.2」(日経BPマーケティング)など。宇宙作家クラブに所属。
Twitterアカウントは@ots_min
Copyright © ITmedia, Inc. All Rights Reserved.
 「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告
「日本はレスキューロボットを開発しても配備される状況にない!!」〜東北大・田所教授が福島原発での活動を報告 ルンバ・ルンバ・ルンバ――お掃除から軍事までiRobot社のロボット大集結!!
ルンバ・ルンバ・ルンバ――お掃除から軍事までiRobot社のロボット大集結!! 「歩行型ロボットは確かにカッコいい。しかし……」――お掃除から軍事用まで手掛けるiRobot社のロボット開発
「歩行型ロボットは確かにカッコいい。しかし……」――お掃除から軍事用まで手掛けるiRobot社のロボット開発