連載
自由度と、リンク機構の基本のいろいろ:メカメカリンクで設計しよう(1)(3/3 ページ)
今回は4節リンクのうち、2次元動作について解説する。「自由度」や「対偶」についてあらためて確認していく。
「対偶」って、何だろう?
対偶とは、構成するリンク機構のうち、対となる2つのリンクが相対的な運動の自由度を残して結合したものをいいます。リンク機構を構成する上で、基本となる対偶の種類は次の6つです。
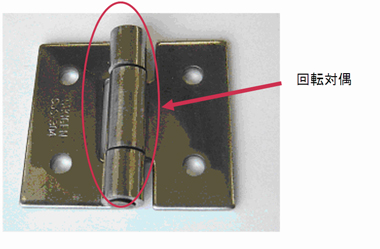
- 回転対偶(自由度=1) 例:チョウバン、転がり軸受けなど
- すべり対偶(自由度=1) 例:ガイド溝、リニアガイドなど

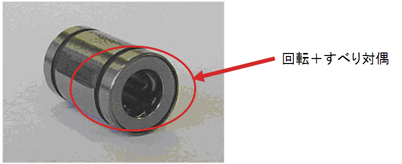
- 回転+すべり対偶(自由度=2) 例:ボールブッシュなど
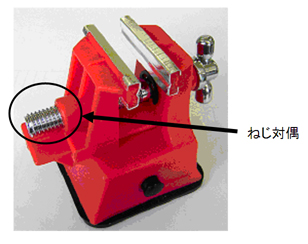
- ねじ対偶(自由度=1) 例:ねじ機構、ボールねじなど
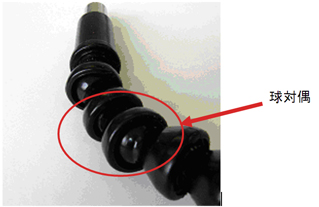
- 球対偶(自由度=2 or 3) 例:ボールジョイントなど(ジョイント部でねじり回転できる場合は自由度3)
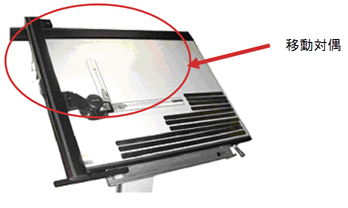
- 移動対偶(自由度=2 or 3) 例:ドラフター、広域ワイパー機構など(平面上で回転できる場合は自由度3)
上記6種類の対偶を組み合わせてリンク機構の構成を考えて組み合わせることで、オリジナルのリンク機構を創造することができるのです。
次回は、基本的なリンク機構の種類を理解し、リンクの長さを変えるだけで違った動作ができるという四節リンク機構の特徴を知りましょう。(次回に続く)

Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 羽を回転させる力を首振りに変換する扇風機の「リンク機構」
羽を回転させる力を首振りに変換する扇風機の「リンク機構」
身近にあるモノを題材に、それがどんな仕組みで動いていて、どんな機構が使われているのかを分かりやすく解説する連載。今回はつまみの付いた昔ながらの扇風機をテーマに、首振り機構の仕組みを理解する。 クローズドループ構造のいろいろ
クローズドループ構造のいろいろ
第1回で登場した回転対偶やすべり対偶を組み合わせて、1自由度を持つ平面リンクに絞って詳しく解説する。 航空機の車輪格納に使われるリンク機構
航空機の車輪格納に使われるリンク機構
動作が終わったとき、コンパクトに格納したい! そんな機構を作るときのよいお手本が、航空機の車輪格納機構だ。 自動車のワイパーを上手に動かすリンク機構
自動車のワイパーを上手に動かすリンク機構
自動車のワイパーが互いに干渉せずに動作するにはどうしたらいい? 今回は、回転運動をするクランク機構の応用例を解説。 無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
今回は設計公式を基にリンクの動作を計算する方法と、FreeCADの編集機能を使った設計を紹介する。今回のテクニックを応用すれば干渉チェックも可能だ。Excel計算シート付き! ミニチュア折りたたみイスを3Dプリンタで出力しよう
ミニチュア折りたたみイスを3Dプリンタで出力しよう
最終回は、ミニチュア折りたたみイスの3次元モデルの最終仕上げをした後、FabCafeへGo! 3Dプリンタで無事出力できるか? 記事中で、完成した3次元モデルのダウンロードもできる。