クローズドループ構造のいろいろ:メカメカリンクで設計しよう(2)(1/3 ページ)
第1回で登場した回転対偶やすべり対偶を組み合わせて、1自由度を持つ平面リンクに絞って詳しく解説する。
今回から具体的に、代表的なリンク機構の種類と動作を確認していきましょう。
リンク構造の種類
リンク構造は、次に示す「オープンループ機構」と「クローズドループ機構」の2種類に大別されます。
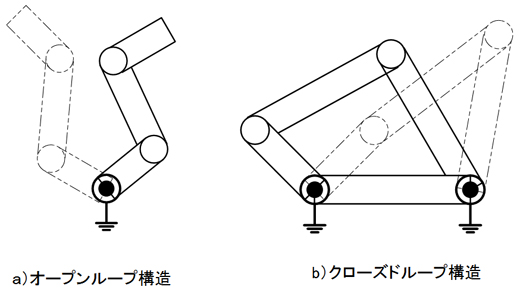
- オープンループ構造:それぞれのジョイントにアクチュエータやセンサーを取り付け、多自由度の動作を行います。産業用ロボットのマニピュレータなどに活用されています。
- クローズドループ機構:アクチュエータによって1つのリンクを動かすことでほかのリンクが追従する構造となります。コストの厳しいOA機器などの製品では、クローズドループ機構を用いて機構構想を行うことが一般的です。

クローズドループ構造の種類
本連載では、クローズドループ構造のみを取り上げます。第1回で登場した回転対偶やすべり対偶を組み合わせて、1自由度を持つ平面リンクに絞って詳しく解説していきます。
平面リンク機構の代表的な種類に、次の3つがあります。
- 四節リンク機構
- スライダクランク機構
- 両スライダクランク機構
リンク機構の中でも、最も汎用性が高く利用されているものが「四節リンク機構」です。至って単純な動作から、少し複雑でユニークな動作まで、リンクの長さや形状、支点の配置によって変幻自在に動作する、リンク機構の基礎ともいえるものです。
それでは、四節リンク機構の種類について、今回からしばらくの間、その種類と特徴を解説していくことにしましょう。
四節リンクの構造
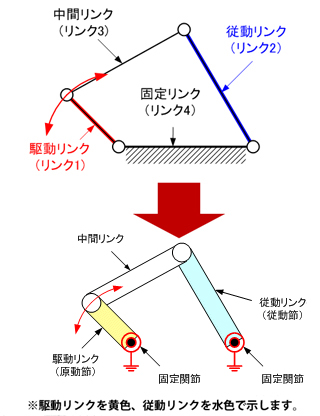
四節リンク機構の要素を、動作という視点で分類すると、モータなどのアクチュエータによって駆動力が与えられる「駆動リンク」と、その駆動リンクに押されたり引っ張られたりすることで、追従する「従動リンク」、駆動リンクと従動リンクを接続する「中間リンク」に分けられます。
まず、四節リンクがどのような要素で構成されているかを図で確認しておきましょう。固定リンクの両端に関節(ジョイント)があり、どちらかの関節につながったリンクに駆動を与えたものを駆動リンクと呼びます。駆動リンクに対向する側を従動リンクと呼び、駆動リンクと従動リンクを結ぶリンクを中間リンクと呼びます。
本連載では、四節リンクのそれぞれを下図のように表します。
「てこ」と「てこの原理」
てこ(梃子)とは、固い棒状のものをいいます。てこの原理とは、てこの支点から力点(力をかける部分)の距離の長短によって、作用点(力点で生まれた力がかかる部分)において小さな力を大きな力に変えたり、大きな力を小さくしたりすることができる原理をいいます。
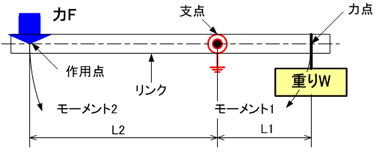
重りWによって、リンクが支点を中心に時計回り(CW:Clockwise)に回転しようとモーメント1が発生します。重りと反対側に力Fを掛けると反時計回り(CCW:Counter-Clockwise)に回転しようとモーメント2を発生させることで、リンクはバランスを保つことができます。
互いにつり合わせる場合、モーメント1とモーメント2が等しくなるようにすればよいことが分かります。
- モーメント1=W×L1
- モーメント2=F×L2
つり合いの方程式 W×L1=F×L2
L2>L1の関係があることから、次式より、力Fは重りWよりも小さい荷重で支えればよいことも理解できると思います。
リンク機構の動力設計は、てこの原理から力の関係を算出し、必要とする駆動力を持ったアクチュエータを選定します。てこの原理を利用して、力の増減が発生するということを、失念しないよう注意しましょう。
Copyright © ITmedia, Inc. All Rights Reserved.