機構制御系のモデリング(その3) 〜回転2関節機構の運動学・動力学を考える〜:1Dモデリングの勘所(38)(2/5 ページ)
「1Dモデリング」に関する連載。連載第38回では「機構制御系のモデリング(その3)」と題し、回転2関節機構の運動学、動力学を考えるについて考える。
運動学(逆問題)
図2で先端の位置を(x,y)にするために、駆動部(θ1,θ2)をどう動かしたらいいかを考えるのが逆運動学で、順運動学の式のθ1,θ2について解く必要がある。この場合は、式2となる。
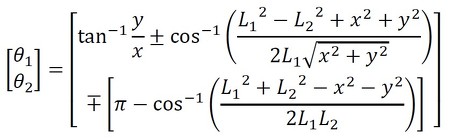
すなわち、解が複数(2個)存在する。このように、機構が複雑になると逆問題は解が複数となり、解の導出には工夫が必要となる。
回転2関節機構の逆運動学を図5に示す2つの事例で考える。

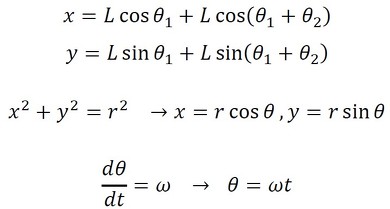
最初に、図5(a)に示す逆問題1を考える。機構の先端(x,y)が半径rの円軌道上を角速度ωで一定回転するためには、各関節の角度をどのように変化させたらいいかという問題である。図5(a)より、以下の式が導出される(式3)。なお、以降、2つのリンクの長さは同じLとする。
上式を理論的に解いてもよいが、Modelicaでテキスト表記すると以下となる(リスト2)。ここではL=2、r=3とする。
model staticReverse1
import Modelica.Constants.pi;
Real theta;
Real theta1(start = pi/4);
Real theta2(start = -pi/2);
Real x;
Real y;
parameter Real L = 2;
parameter Real r = 3;
parameter Real omg = 2*pi;
equation
x = L*cos(theta1) + L*cos(theta1 + theta2);
y = L*sin(theta1) + L*sin(theta1 + theta2);
x = r*cos(theta);
y = r*sin(theta);
theta = omg*time;
end staticReverse1;
リスト2を解けば解が求まるが、2リンク機構の逆問題の解は2個あることを既に述べた。Modelicaは自動的にこの2つの解を求めてくれるわけではないので、解の値をある程度予測して、初期値(θ1,θ2)を与えてあげる必要がある。
リスト2の赤字部分が初期値に相当する。こうして求めた図5(a)の逆運動学の2つの解を図6に示す。このように、初期値によって異なる解にたどり着く。その際、解がいくつあるかを事前に知っておくことが重要である。図6からこの事例では第2関節の角度は一定値で、第1関節が一定角速度で動いていることが分かる。

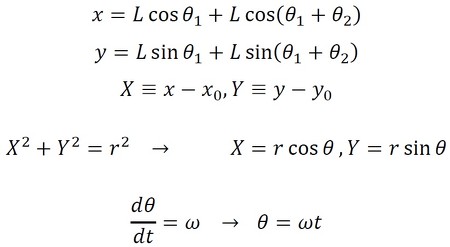
次に、図5(b)に示す逆問題2を考える。機構の先端(x,y)が(x0,y0)を中心とした半径rの円軌道上を角速度ωで一定回転するためには、各関節の角度をどのように変化させたらいいかという問題である。図5(b)より、以下の式が導出できる(式4)。
上式をModelicaでテキスト表記すると以下となる(リスト3)。ここではL=2、r=2、x0=1、y0=1とする。
model staticReverse2
import Modelica.Constants.pi;
Real theta;
Real theta1(start = -pi/4);
Real theta2(start = pi/4);
Real x;
Real y;
Real X;
Real Y;
parameter Real L = 2;
parameter Real r = 2;
parameter Real omg = 2*pi;
parameter Real x0=1;
parameter Real y0=1;
equation
x = L*cos(theta1) + L*cos(theta1 + theta2);
y = L*sin(theta1) + L*sin(theta1 + theta2);
X=x-x0;
Y=y-y0;
X = r*cos(theta);
Y = r*sin(theta);
theta = omg*time;
end staticReverse2;
リスト3を逆問題1と同様にして解くと、逆運動学の解は図7に示す2つの解となる。逆問題1と比べると各関節は複雑な動きをしており、第1関節だけでなく、第2関節も時間とともに変動している。

Copyright © ITmedia, Inc. All Rights Reserved.