制御系が暴走しないように設計する:無償ソフトで技術計算しよう【制御工学応用編】(2)(2/2 ページ)
【制御工学応用編】では、制御系の応答性や安定性を評価する方法とPIDコントローラーの設計について説明する。今回はFreeMatを使って、制御系の安定・不安定の状態を判別してみる。
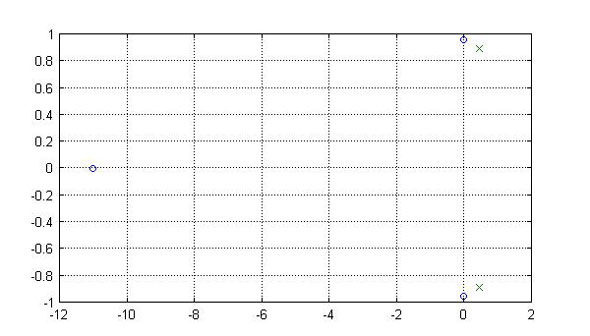
では、(1)式で示される伝達関数の安定性を判別してみます。ここで、m=1、c=1、k=10、kd=10、ki=10とします。従って、特性多項式の係数は次数の高い方から、m=1、c+kd=11、k+kp=10+kp、ki=10となるため、比例定数kpが10では、
--> plot(roots([1,11,20,10])+0*i,'o',roots([10,10,10])+0*i,'x')
とすると、図4のように、解の実部は全て負となり、系は安定であることが分かります。
上のコマンドで「+0*i」としているのは、解が実数でも複素プロットができるように虚数部を追加させるためです。
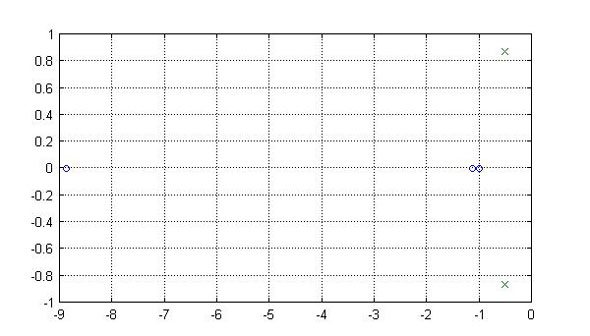
比例定数kpが-9.09では、
--> plot(roots([1,11,0.91,10])+0*i,'o',roots([10,-9.09,10])+0*i,'x');
とすると、図5のように、実部が0の解が存在し、出力は図2(前ページ)のように振動し続けます。
比例定数kpが−10では、
--> plot(roots([1,11,0,10])+0*i,'o',roots([-10,10,10])+0*i,'x')
とすると、これは図3の条件と同じで、前述のように、実数部が正の箇所に「○」が2か所あり、「×」とは重ならないため、不安定となることが分かります。図2でも、出力は発散しています。
このように、FreeMatを用いれば、簡単に安定性を判別できます。では、従来の安定判別法は不要なのかというとそうではなく、どこが原因で不安定なのかとか、安定化させるにはどのようにすればよいのかといったことを考えるには、各種の安定判別法が必要になります。詳しくは記事末の参考文献を参照してください。
次回は、フィードバック制御系の過渡特性と定常特性について説明します。
参考文献
- 「MATLABハンドブック」小林一行著、秀和システム刊
- 「はじめてのFreeMat」赤間世紀著、工学社刊
- 「制御工学」豊橋技術科学大学制御工学教育連携プロジェクト著、実教出版刊
筆者紹介
伊藤孝宏(いとう・たかひろ)
1960年生。小型モーターメーカーのエンジニア。博士(工学)。専門は流体工学、音・振動工学。現在は、LabVIEWを使って、音不良の計測・診断ソフト、特性自動検査装置などの開発を行っている。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 無償の工学計算ソフト「FreeMat」をインストールしよう
無償の工学計算ソフト「FreeMat」をインストールしよう
無償の工学計算ソフトでも、かなり高度な計算ができる! 今回はインストール編。工学計算の初心者もぜひチャレンジしよう。 数式を使わないで自動制御について教えるよ
数式を使わないで自動制御について教えるよ
数式がいっぱい出てくる制御理論の習得に挫折した人は多いカモ。制御のエッセンスだけなら数式がなくても理解できる! 組み込みソフト開発の“主役”は誰に?
組み込みソフト開発の“主役”は誰に?
かつて、組み込み機器用ソフトウエアの開発は、それを専門とする技術者の手で行われていた。しかし、現在は、モデルベース設計ツールをはじめとした設計の抽象度を高めることが可能なツールを利用することで、システム設計者やドメインエキスパートであっても、組み込みソフトウエアを開発できる環境が整いつつある。本稿では、代表的なモデルベース設計ツールとその活用事例などを紹介した上で、組み込み用ソフト開発の現状についてまとめる。 無償の工学技術計算ツール「Mathcad Express」を使ってみた
無償の工学技術計算ツール「Mathcad Express」を使ってみた
設計計算や制御計算など高度な活用から、日常使いのローエンドな活用まで幅広い、無償の工学技術計算ツール「PTC Mathcad Express」を使ってみた。「単位をごっちゃにして数式を書いても計算してくれる」など便利機能がいろいろある。仕事での面倒くさい計算が楽しくなる、かも!?