「盲導犬を目指して」――ベアリング生産の日本精工が手掛けるガイダンスロボット:TECHNO-FRONTIER 2013 ロボット
日本精工(NSK)は、「TECHNO-FRONTIER 2013」(会期:2013年7月17〜19日)のヒューマンアシストロボット・デモ会場において、視覚障害者を先導する「障害物回避先導ロボット」の体験デモを実施した。
日本精工(NSK)は、「TECHNO-FRONTIER 2013」(会期:2013年7月17〜19日)のデモンストレーション会場において、視覚障害者を先導する「障害物回避先導ロボット(ガイダンスロボット)」の体験デモを実施した。
今回披露されたガイダンスロボットは、比較的床面の平らな病院内(屋内)での利用を想定している。視覚障害者の方が、ロボットの操作部(グリップ)に触れ、押すと前進する。壁などの障害物との距離をロボットの前面に設置されたレーザーセンサーで検出しながら自動的に回避行動をとってくれる他、段差も床面に向けて照射する赤外線センサー(PSD)で検出し、回避することができる。また、スピーカーも搭載されており、障害物や段差を検出した際に警告を発してくれるという。
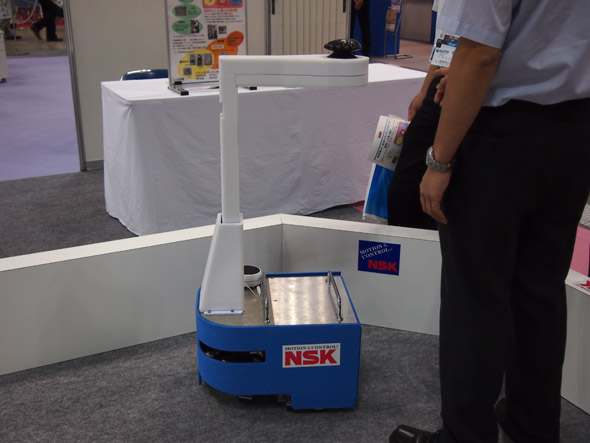
操作部には、6軸の力センサーを搭載する。力の加えられた方向と大きさを検出し、ロボットを直感的に操作できる(強く押すと速く、弱く押すと遅くなる)ため、“歩かされている”感覚がなく、自身の望むペースで移動することができる。バッテリー駆動で3.5時間動作する。
「当社が得意とするベアリング(軸受)生産に続く事業の柱として、新技術を開拓していこうということで、ロボット開発にフォーカスした。人とともに行動するロボットについて、いろいろと調査した結果、盲導犬や介護犬は貸与待機者数に対し、稼働頭数が極端に少ないことが分かった。さらに、希望者と犬との相性、世話の負担やアレルギー/衛生面での課題、そもそも訓練に時間がかかるなどの問題点が見えてきた。そこで、“視覚障害者向けロボット”をテーマに掲げ開発に着手した」と説明員。


当初は、屋外も含めたあらゆる生活空間での活動を視野に、四足歩行(犬型)ロボットの開発を進めていたが、早期実用・導入実現性を考えて、病院内での利用に絞り、現在の車輪タイプにしたという。現在、実証試験に向けた取り組みを進めており、2014年ごろから「さがみロボット産業特区」と連携した実証試験の開始を目指している。同社としては、「この実証試験の結果をフィードバックし、2016年をめどに実用化したい」(説明員)考えだ。
ちなみに、今後開発予定の技術としては、病院内の地図を基にした音声ナビゲーション機能や現在使用している市販品のセンサーを自社開発のものに置き換えることなどを計画しているという。
ロボット開発の最前線

Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 予約して、後は乗るだけ――自律走行で送迎してくれる日立の移動支援ロボ「ROPITS」
予約して、後は乗るだけ――自律走行で送迎してくれる日立の移動支援ロボ「ROPITS」
日立製作所は、任意の地点まで自律的に搭乗者を迎えに行ったり、目的地まで連れて行ったりできる1人乗り用の移動支援ロボット「ROPITS」を開発した。 クマ型ロボットが優しく包み込むように“お姫さま抱っこ”
クマ型ロボットが優しく包み込むように“お姫さま抱っこ”
東海ゴム工業は、2012年9月26日から東京ビッグサイトで開催される「第39回 国際福祉機器展 H.C.R.2012」で、同社独自開発のオールゴム触覚センサーを採用した介護支援ロボットの最新版、「RIBA-IIx(リーバツーエックス)」を初披露する。 ムラタセイサク君の“止まっても倒れない技術”を応用した電動歩行アシストカー「KeePace」
ムラタセイサク君の“止まっても倒れない技術”を応用した電動歩行アシストカー「KeePace」
村田製作所と幸和製作所は、電動歩行アシストカー「KeePace(キーパス)」を共同開発した。倒立振子制御技術などが組み込まれた「アシスト制御システム」を進化させ、坂道での歩行サポートや旋回機能を強化している。