のしのし歩く! テオ・ヤンセンのビースト機構:メカメカリンクで設計しよう(番外編)(1/2 ページ)
今回のお題は、テオ・ヤンセンのストランドビースト。たった1つの動力で、さまざまなリンクを作動させて、まるで動物が歩くようなリンク機構について解説する。
今回は「メカメカリンクで設計しよう」の番外編として、読者から要望のあったテオ・ヤンセン(Theo Jansen:オランダ出身の彫刻家・物理学者)のリンク機構について解説します。
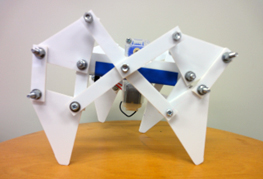
最終回で紹介した写真のおもちゃは、テオ・ヤンセンのストランドビースト(Strand beest:以下「ビースト」)という機構を参考に、リンク機構として動作できるレベルで製作したものです。
このリンク機構に使っている構成部品を表1に示します。
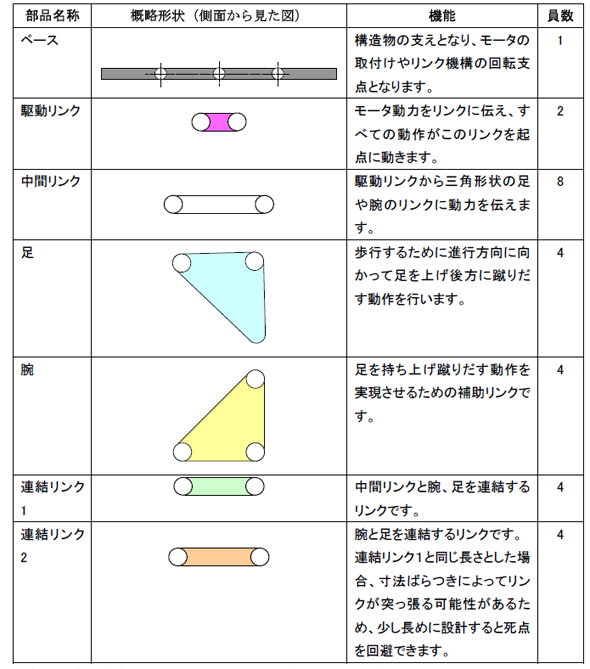
これらのパーツを組み立てると、リンクはどのように動くのでしょうか?
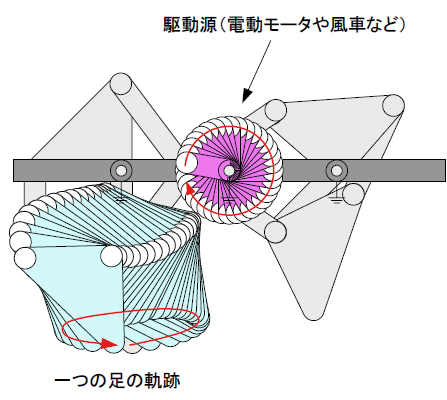
まずは入力である駆動リンクの動作と、出力である足の軌跡を確認してみましょう(図1)。
それでは、実際に動作を確認していきましょう。理解しやすいよう、1面の動作から多面の動作へと順を追って確認していくことにします。
図2のアニメーションでは、ある一面のリンクの動きを示しています。
足の動きが分かりやすいようベースを持ち上げた状態で動作させたイメージ図と理解してください。
駆動リンク(中央赤色のリンク)が時計回り(CW)に回転することで、周辺のリンクが複雑に動く様子が分かりますが、足だけに着目すると図1に示した軌跡で足が動いていることが分かります。
さらにもう1面のリンクを追加して重ねた状態の動作を見てみましょう。このとき、追加したもう一面の駆動リンクは先の1面と位相を180度ずらして取り付けることによって、“4つ足の動物が歩くような”動きを実現させています。
筆者注:アニメーションでは、追加した1面のリンク機構をグレー色にして、差別化しています。
タイミングがずれた動作をさせたり、同期した動作をさせたりするために、駆動リンクの位相を変更することは、リンク機構設計でよく使うテクニックの1つです!
図3では、あたかも動物が歩くような動作をしたリンク機構ですが、実際に地面を動くアニメーションを見てみましょう(図4)。
図4のアニメーションでは、奥行き方向の傾きを表すことができないのですが、前回の動画を見れば分かるように、進行方向に対して左右方向にも傾き、ギクシャクした動作を伴いながら進んで行きます。
なぜ、このようなギクシャクした動作になるのでしょうか?
Copyright © ITmedia, Inc. All Rights Reserved.