ロボットに3Dの“目”を持たせて品質検査を自動化、リンクウィズの挑戦と課題:羽田卓生のロボットDX最前線(2)(2/4 ページ)
「ロボット×DX×工場」をテーマに、さまざまな領域でのロボットを活用したDXの取り組みを紹介する本連載。第2回は、3Dスキャナーを産業用ロボットの“目”として活用するためのソフトウェアを開発するリンクウィズを取り上げる。品質検査の省人化に貢献するソリューションだが、本格的な導入を進める上ではいくらか課題も残されているようだ。
3Dスキャナーで実現する3つの機能
吹野氏はL-QUALIFYを開発した過程を振り返り「3Dスキャナーの急速な高性能化が、外部環境を認識するロボットシステムを実現する土壌を作った。センシングデバイスの進化が、産業用ロボットの用途を拡大しつつある」と語った。

そもそも3Dスキャナーは、立体物の形状をレーザー照射やセンサーによる接触といった手法で測定して、3次元(X、Y、Z軸)の座標データ(点群データ)を取得するというものだ。この点群データを用いることで、さまざまな解析が可能になる。
具体的にL-QUALIFYでは、以下のような解析が行える。
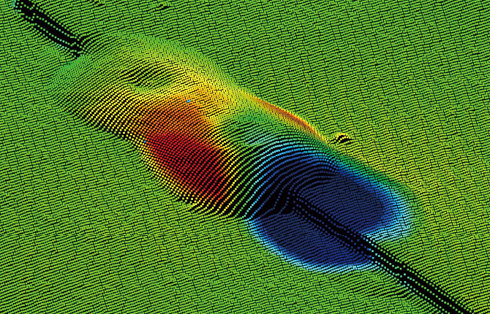
1つ目は「3D形状比較機能」だ。正しく、溶接ができている部分は緑色、盛り上がり過ぎていると赤色、逆に基準より標高が低いと青色に表示される。わずかな高さの違いも3Dスキャンで見分けられるようになっている。
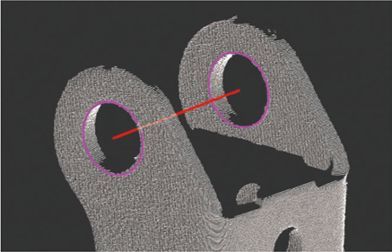
2つ目は「ホール認識機能」である。座標情報だけでなく、製品に空いている穴の径の大きさや中心位置の正確性を確認できる。
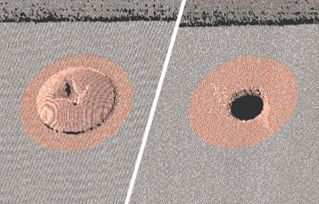
3つ目は「在荷確認機能」。ねじ穴に正しくねじが収まっているかを確認する。ねじが正確にはまっていなければ、当然、その箇所だけ点群データが空白化する。このため、マスターデータに登録した正常時のデータと比べると点の数が著しく少なくなり、そうした箇所を「(ねじのはまっていない)穴が残っている」とシステムは判定する。
Copyright © ITmedia, Inc. All Rights Reserved.