コンピュータ・アーキテクトのためのモーター制御:SYSTEM DESIGN JOURNAL(1/5 ページ)
「モーターを制御する」。一見すると簡単な課題に思えますが、その原理や課題、現状を再確認すると、リアルタイムシステムアーキテクチャの今後の方向性を示していることが分かります。
複数のCPUコア、ハードウェアアクセラレータ、イーサネットインタフェースを使用してモーターを制御するにはどうすればよいでしょうか? 1ドルのマイクロコントローラー(MCU:Micro Controller Unit)でモーターを駆動した経験のある設計者にとっては、ばかげた質問に聞こえるかもしれません。
しかし、その答えは制御システム・デザインに関する興味深いケーススタディであると同時に、リアルタイム・システム・アーキテクチャの今後の方向性も示しています。
出発点
まず、このドラマの小さな主人公を紹介しましょう。その名も「永久磁石同期モーター(permanent-magnet synchronous motor)」です。以下は頭文字を取って「PMSM」と呼びます。PMSMにはさまざまなサイズや形状があり、用途も巨大な扉の開閉から手術ロボットの関節まで広く利用されています。
普及の理由は「固有の信頼性」や「低コスト」の他、ここでの重要なポイントである「適切に制御した場合の精度と効率性」にあります。実際、PMSMは、アプリケーションの要件が厳しい場合、複雑性を電気/機械デザインからソフトウェアに移転することが可能です。
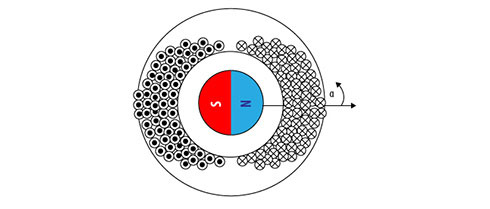
PMSMは機械的にも電気的にも非常に単純です(図1)。ローターはその名の通り、永久磁石で、通常はモーターケースの周囲に120度に等間隔で配置された3つのステータ巻線があります。「秘伝のソース」は、線の巻き方が均一でないことだけです。ステータ周囲の巻きの密度が正弦曲線状に分散されており、巻線は実際には周縁部で少し重なり合っています。正弦波電流を適切な位相で巻線に加えると、ローター磁界に対して正しい角度で回転磁界が発生し、それによってローターへ非常に効率的にトルクが加わります。
PMSMの制御は難しいことではありません。簡単なMCUでルックアップテーブルと補間を使用して、ドライバ回路に必要な時間変化正弦波を生成すれば、巻線に電流を供給することが可能です。演算を正しく行えば、巻線によってモーター内部に回転磁界が発生し、ローターは素直に従います。完全停止状態からの始動に関する幾つか気を付けるべき点があり、それを除けば説明終了かと言えば、実はそうでもありません。
Copyright © ITmedia, Inc. All Rights Reserved.