ベクターとZMPが車車間通信による追従走行制御の実証実験を実施:自動車・次世代モビリティの研究開発を加速
ベクター・ジャパンとゼットエムピーは、統合測定適合ツール「CANape」と超小型ロボットEV「RoboCar MV」を用いた車車間通信による追従走行制御の実証実験を行い、研究開発における有効性を確認したと発表した。
ベクター・ジャパン(以下、ベクター)とゼットエムピー(以下、ZMP)は2012年5月16日、ベクターの統合測定適合ツール「CANape」とZMPの超小型ロボットEV「RoboCar MV」を用いた車車間通信による追従走行制御の実証実験を行い、研究開発における有効性を確認したと発表した。
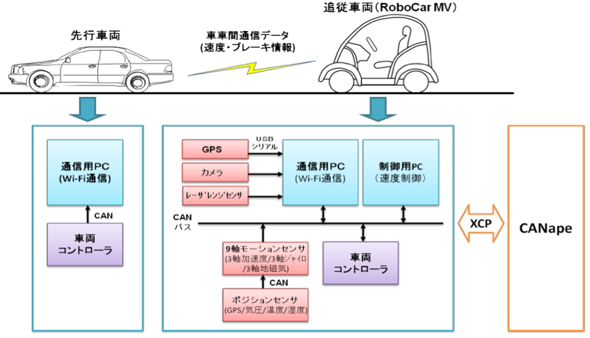
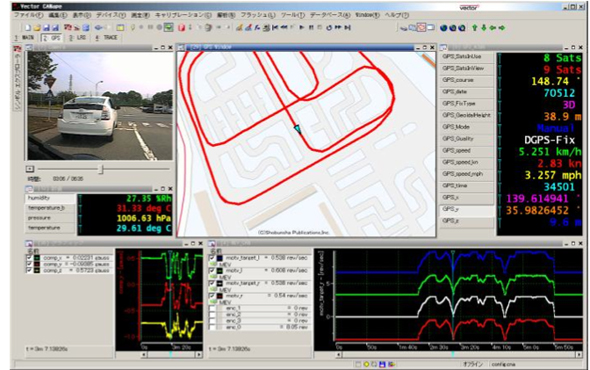
実証実験では、Wi-Fiを用いて車車間通信を実現。先行車両(通常の乗用車)の車速・ブレーキペダルの情報を後方の追従車両(RoboCar MV)が受け取り、その情報を基にモータを制御するというもの。先行・追従車両からの各種情報はCANapeにより収録され、駆動状況と走行位置の統合的な可視化を実現する。さらに、車両の各種センサーから取得した情報は全て同期して取得できるため、データ処理作業の大幅な負荷軽減も検証できたという。なお、今回の実証実験では、汎用的なWi-Fiを通信に用いたが、5.8GHz帯DSRC(Dedicated Short Range Communication)などへの置き換えも可能だとする。
両社は引き続き、自動車および次世代モビリティの研究開発を加速するため、CANapeとRoboCar MVを用いた研究開発プラットフォームを提供していくという。実証実験で使用した両製品は、2012年5月23〜25日の3日間、パシフィコ横浜で開催される「自動車技術展 人とくるまのテクノロジー展」で展示される。

Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
 ベクターとZMP、次世代モビリティ開発を促進する開発環境
ベクターとZMP、次世代モビリティ開発を促進する開発環境
ベクター・ジャパンとゼットエムピー(ZMP)が、EVなど次世代モビリティの開発環境における協業を発表。CANapeとRoboCar MEVがXCPで連携可能に。- 連載記事「測定/キャリブレーションプロトコルXCP入門」
- >>「車載ソフトウェア開発」コーナー