おもちゃで解説。回転&スライドを自在に操る方法:メカメカリンクで設計しよう(10)(1/2 ページ)
リンクをうまく使えば、回転&スライドが自由自在。おもちゃの機構を見ながら、動きの変換を見ていこう。
今回は直線運動を利用した機構を紹介します。その機構設計では、今回紹介するような入出力の構造によって運動方式を変換し、要求仕様を満足させます。
- 入力(回転運動)→出力(直線運動)
- 入力(直線運動)→出力(回転運動)
- 入力(直線運動)→出力(直線運動)
以降では、このような運動方式の変換を実現させる構造例を見ていきます。
【No.41】ラプソンスライダー 1(回転入力−スライド出力)
レバー部を揺動させることで、リンクの回転運動を直線スライド運動に変換するものです。入出力の関係を逆転させると、直線スライド運動を回転運動に変換することもできます。
このような構造を「ラプソンスライダー」と呼びます。特徴として、スライドジョイント部はレバーリンクのスライドと回転の両方を許容するよう工夫しなければいけません。
少し構造が異なりますが、同じ原理を利用したトースターのおもちゃでの使用事例を紹介します。

トースターのレバーを垂直方向に手で押し下げると、歯車の付いたアームが回転し、相手歯車にかみ合います。アームにはねじりばねが組み込まれて復帰する力が働きます。
相手歯車には複数の歯車がかみ合い、大きな減速比を持つよう設計されており、その歯車が発する回転抵抗を負荷としてレバーが徐々に元に戻る構造です。
【No.42】ラプソンスライダー 2(回転入力−スライド出力)
No.41ラプソンスライダー(1)ではスライド部だったのを、軸に変更してリンクを揺動させるものです。軸ごと左右に水平移動します。
No.41と同様に、スライドジョイント部はレバーリンクのスライドと回転の両方を許容するよう工夫しなければいけません。
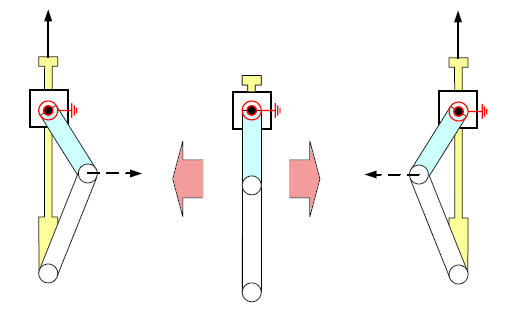
【No.43】スライド入力の揺動機構(スライド入力−回転出力)
直線運動する駆動スライダーにより、中間リンクを介して従動リンクを揺動させる機構です。
この連載で何度も言及しているように、思案点で停止した状態から動作を始めようとすると従動リンクはどちらに動くのか保証できません。そのため、図4では従動リンクと中間リンクが一直線上になる前に、駆動リンクを停止させるように駆動スライダーのストロークを規制しているのです。

Copyright © ITmedia, Inc. All Rights Reserved.