人間型ロボットPALROがソフト基盤オープン化で目指すもの:テクノロジー最前線(3)(1/2 ページ)
富士ソフト「PALRO(パルロ)」は、ロボットの世界では珍しいIAベースのオープンアーキテクチャを採用した人間型ロボットだ。さらにソフトウェア基盤をオープン化することにより、知能化技術モジュール、ロボットアプリケーションの集積を目指している。(編集部)
富士ソフトは、連結の売上高が約1400億円、従業員数が1万2000名近い巨大なソフトウェア開発会社。業務系と組み込み系の両面で受託開発を中心に事業を行う(いずれも2010年3月期実績)。その同社が2010年春に教育機関向けに発売したヒューマノイドロボット「PALRO」(価格は29万8000円)が話題を呼んでいる。人の形をした二足歩行が可能な小型ロボットだ。
ヒューマノイドロボット自体は、ホンダ、ソニーなどの機器メーカーが以前から製品化しており、特に珍しいものではない。PALROの新規性は、オープンアーキテクチャを採用し、ロボットアプリケーション向けのプラットフォームを目指している点にある。これは、機器メーカーが従来開発してきた“一品物”にない特徴である。

神経部品を組み合わせて高精度な知能を実現
PALROは身長39.8cm、体重1.6kgのボディーを持ち、全身で20カ所に組み込んだアクチュエータにより人のように駆動する。外界とのインターフェイスとしては、音声認識・方向認識マイク、スピーカー、CMOSカメラ(30万画素)、71個のセンサ(温度、負荷、ジャイロ、加速度、距離、回転角度)、ネットワークとつながるための無線LANモジュールなどを装備。これらのデバイスと「神経部品」と呼ぶソフトウェアモジュールを駆使し、「移動」「コミュニケーション」「人感」「学習」という4つの知能領域に対応する。また、それらの知能を生かしてユーザーへサービスを提供するアプリケーションを搭載する(写真撮影、メッセージの録音・再生、メールの読み上げ、インターネットニュースの読み上げなど)。
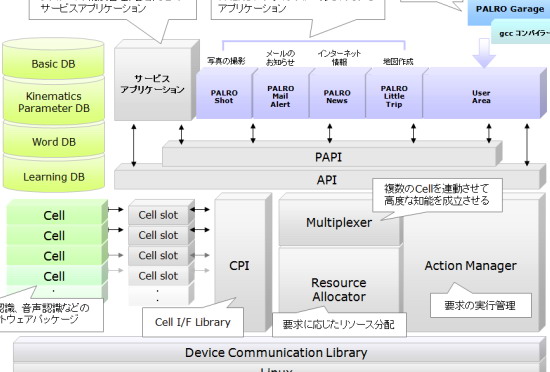
移動知能では、あらかじめ撮影した室内の画像をつなぎ合わせて地図(空間座標)を生成。カメラでとらえる画像と付き合わせて自分の位置を認識し、目的地への最適ルートを算出する。さらには、重心が連続して変化する動的歩行(人の歩き方)でも安定性を維持する“動的安定歩行”に対応しているため、段差など路面変化に合わせたり、シコやすり足などかなり人間的な動きも行う。
コミュニケーション知能では、単純に会話ができるだけでなく、「顔認識」「顔個別認識」「動体検知」といった神経部品により、ユーザーの顔を覚えたり、目を合わせる、遠ければ近づく、いなければ呼び掛けるなど高度なコミュニケーションを行う。一方、人感知能とは、一定空間の中で人の“流れ”を検知するもの。学習知能では、場所・タスク・時間の3つを関連付けて記憶し、自律的な行動を行う。一度キッチンでPALROに対してメールチェックを頼めば、次回からはキッチンに移動すると自ら新着メールを読み上げてくれるといった行動だ。

富士ソフト ロボット事業推進部 ビジネス推進室 主任の月岡 要氏は「PALROは複数の神経部品を組み合わせ、より精度の高い知能を実現している。例えば、音声認識も単に人の声を解析するのではなく、音源方向認識と組み合わせることで認識率を高めている。これは従来のヒューマノイドロボットにはない知能化技術」と強調する。
これらの神経部品は、富士ソフトがコンシューマ機器から産業機器まで幅広い分野の組み込みソフトウェア開発で培ったノウハウを活用している。その背景では、同社は20年以上前から学生向けの「全日本ロボット相撲大会」を主催しているほか、筑波大学をはじめとする大学との産学連携により、独自にロボット技術の研究開発を行っていた。富士ソフトとロボットの関係は“知る人ぞ知る”だったのだ。
Copyright © ITmedia, Inc. All Rights Reserved.