ラプラス変換と複素数が導く! +Dのご利益:独学! 機械設計者のための自動制御入門(8)(2/4 ページ)
横風を受けて車がずれても元の位置に戻る仕組みはできた感じだけど、まだ何か足りない。PI制御の不足を補うのは?
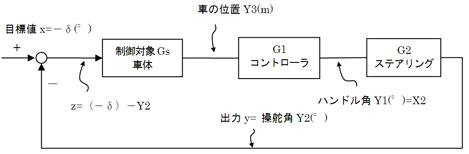
そうか! 外乱に対抗するためには、その反対方向にハンドルを回すような命令を車に与えてやればいいんだ。だから目標値を−δとしたフィードバックシステムと同じことになるんだ!(図3)
そういうことやねん。だから、横風を受けて車がずれそうになった場合に、素早く対抗する操舵角までステアリングできればよいということになる
動画2は、そのステアリングの応答特性がよくないってことか
そこで、今回はステアリングの応答性、つまり動特性を改善する方法を考えてみようや
しかし、応答性というのはハード固有の能力で決まると思うんだ。それで、ステアリングの性能はハードで決まっているから、ステアリングを新たに設計しなければ無理なんじゃないの?
確かに、何事にも限界というものがある。だから、どんなに頑張っても、無理なことはある。しかし、動画2の性能が限界であるとどうして決め付けるんや?
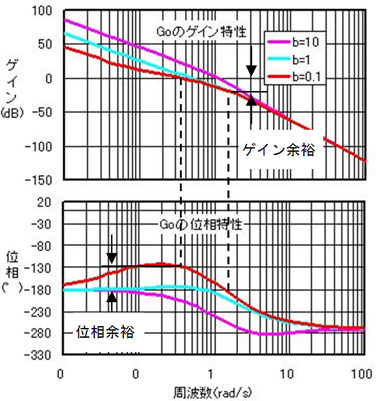
そういわれればそうだけど、前回設計したPI制御のボード線図を見る限り、無理なような気がするんだけどなぁ……
じゃあ、前回のPI制御のボード線図を見てみようか(図4)。で、どこが限界なんや?
なんとなく、そう思っただけなんどけどね……
根拠のない思い込みやな。まず、図3のフィードバックシステムは、入力をx、出力をyとすると
そして開ループシステムの伝達関数をと置くと、こう
この式は、僕も自分で散々計算して導いたから、よく分かるよ
そうや、何事も訓練が大事や。頭で理解するよりまず体で覚えるということも大事やで。それで、図4のボード線図はコントローラG1をPI制御としたときのG0やった
ふむ、ふむ
ところで、図5に示すような、同じ位相余裕を持つ2つの開ループシステム伝達関数G01、G02のフィードバックシステムは、どちらの方が応答性がいいと思う?
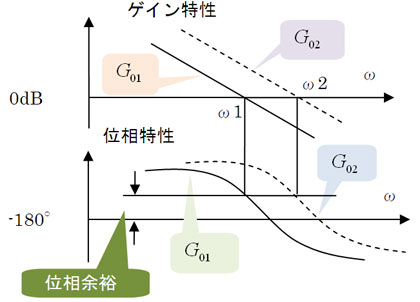
G02はG01を高い周波数までずらした特性を持っているから、直感的にG02の方に決まってんじゃん
直感もいいけど、技術者として人に説明するときは、理論的根拠が欲しいな
Copyright © ITmedia, Inc. All Rights Reserved.