光で距離を測って安全に降下せよ! 〜レーザー高度計(LIDAR)の仕組み〜:次なる挑戦、「はやぶさ2」プロジェクトを追う(10)(1/3 ページ)
小惑星表面までの距離が正確に分からないと、安全にタッチダウンすることができず、激突して探査機が壊れてしまうかもしれない。今回は、「はやぶさ2」で大きく改良された「レーザー高度計(LIDAR)」について紹介しよう。
小惑星へのタッチダウンにおいて、距離を計測するのに使われるのが「レーザー高度計(LIDAR)」と「近距離レーザー測距計(LRF)」である。小惑星表面までの距離が正確に分からなければ、探査機は激突して壊れてしまうかもしれない。安全にタッチダウンするためには、これらの機器が正常に動作することが重要だ。
近距離〜遠距離で使われるのがLIDARで、極近距離で使われるのがLRF。どちらも、初号機で搭載されていた装置であるが、このうち「はやぶさ2」で大きく改良されたのはLIDARだ。何がどう変わったのか、初号機に続き、「はやぶさ2」でもLIDARの開発を担当した宇宙航空研究開発機構(JAXA)/月・惑星探査プログラムグループ(JSPEC)の水野貴秀准教授に話を聞いた。
長さ3mの“光の矢”で距離を計測
まずは、LIDARの計測原理から説明を始めよう。
LIDARが距離を測る“物差し”として利用するのはレーザー光だ。レーザーを物体に照射すると、その一部が表面で反射されて戻ってくる。光の速度は一定(30万km/s)と分かっているので、反射光を検出し、往復に要した時間を正確に計測できれば、物体までの距離は「光速×時間÷2」として簡単に割り出せるというわけだ。この仕組み自体は、地上でも広く利用されている。
下図は、LIDARの構造を示したものだ。
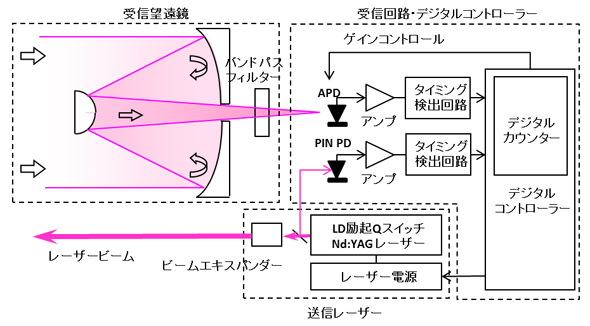
中央下のブロックがレーザー送信部。ここで生成されたレーザーが、ビームエキスパンダーと呼ばれる光学系で指向性をさらに高め、小惑星に向けて射出される。レーザーはパルス状になっており、1秒に1回出力する(つまり、1秒に1回の頻度で計測することができる)。パルスの幅は10ns程度なので、光の速度から計算すると、長さ3m程度の光の矢を放っているようなイメージになる。
反射光を集めるのが左上の光学望遠鏡である。距離が30km程度も離れると、反射光の強度は数10兆分の1という極めて微弱なものになる。そのため、ここでは有効径が110mmという大きなカセグレン型の望遠鏡が採用されている。
受信した光は、右側の回路にあるAPD(アバランシェフォトダイオード)で電流に変換。アンプで適当な電圧レベルに調整して、受信を検出する。また、送信光の一部をPIN PD(PIN型フォトダイオード)でモニタリングしており、この送信と受信のタイミングの差から距離を計算する。
初号機に搭載されたLIDARと、「はやぶさ2」に搭載されるLIDARを見比べると、外観は非常に良く似ていることが分かる。サイズや重量もほぼ同じだ。これには、探査機の大きさが同等である以上、LIDARの大きさもそれほど変えられないという事情がある。


レーザーの出力も同等なのだが、計測レンジは初号機が50m〜50kmであったのに対し、「はやぶさ2」では30m〜25kmとなる。この違いは、小惑星の反射率(アルベド)の違いに起因するものだ。「はやぶさ2」の目的地である小惑星1999JU3は、初号機のイトカワよりも反射率が低いと予測されており、その分、反射光が弱くなるため、レンジが短くなるのだ。ただ、運用時の基本的な計測レンジとなるホームポジションは20km程度になる見込みなので、運用上問題はないそうだ。
| はやぶさ初号機 | はやぶさ2 | |
|---|---|---|
| 計測レンジ | 50m〜50km | 30m〜25km |
| 計測精度 | ±1m(50m時)/±10m(50km時) | ±1m(30m時)/±5.5m(25km時) |
| 分解能 | 1m | 0.5m |
| 計測周期 | 1Hz(1秒に1回) | |
| 表1 LIDARの仕様 | ||
Copyright © ITmedia, Inc. All Rights Reserved.