決勝迷路は史上最長の最短経路――トップは何と7秒台、画像処理マウスも大健闘!!:第34回全日本マイクロマウス大会 リポート(3/3 ページ)
2013年11月23、24日の2日間、流山市生涯学習センター体育館において、「マイクロマウス2013 第34回全日本マイクロマウス大会」が開催された。マイクロマウスクラシック競技(エキスパートクラス、フレッシュマンクラス)、マイクロマウスハーフサイズ競技に合計242台が出場。本稿では86台が出場したクラシック競技エキスパートクラスを中心にリポートする。
速いだけがマイクロマウスじゃない! 画像処理マウスがゴール
今大会、会場で最も注目を集めたのは山下伸逸さんが製作した「mm-7a」だった。
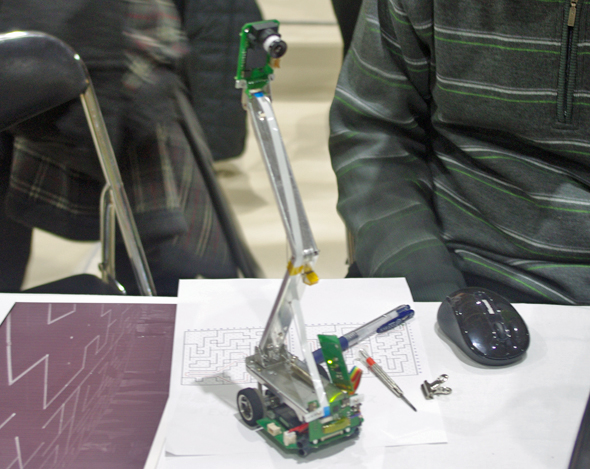
mm-7aはスタート地点で、折りたたみ式のアームを伸ばし、先端に搭載したカメラで迷路を撮影。6枚の画像を合成して解析し、最短経路を発見する。第1回目から最短経路を走行するマイクロマウスだ。

mm-7aの走りを見て、「『迷路を画像解析して走るマイクロマウスが登場したらいいね』とは、初期のころから思っていました。30年たって本当に実現した。すごいことですよねぇ」と油田信一氏(マイクロマウス委員会 委員長/芝浦工業大学特任教授)は、感慨深そうにコメントしていた。
製作者の山下さんは、第2回全日本マイクロマウス大会(1981年)に出場し、アイデア賞を受賞している。1985年以降は仕事が忙しくなったこともあり競技からは遠ざかっていたが、2007年ころにインターネットを検索していて「マイクロマウス競技が、まだ続いていることに驚いた」(山下さん)そうだ。

もう一度参加したいと思ったが「どうせ参加するなら、他人と同じことをしても面白くない」(山下さん)と考え、画像処理技術を搭載したマイクロマウスの開発にチャレンジ。2010年、開発に3年を費やした「mm-6」で出場した。このmm-6はCMOSカメラを搭載し、迷路内を画像認識しながら走行するマイクロマウスだった。
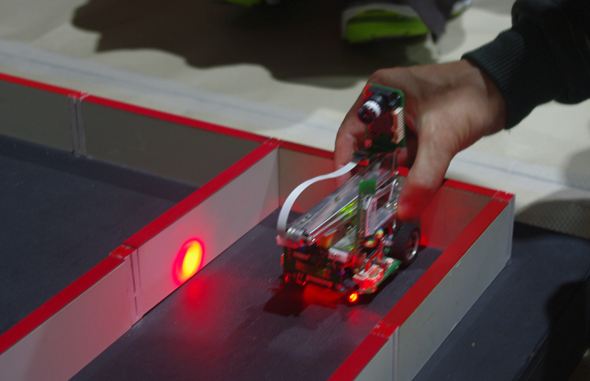
今回のmm-7aは、スタート地点でリフトアップ機構付きCMOSカメラを高く持ち上げて、角度を変えて6枚の写真を撮影する。その場で迷路全体を解析。第1走から最短ルートでゴールを目指すマイクロマウスだ。決勝迷路では、1回目は途中で壁にぶつかったものの、2回目のトライで最短経路を走行し見事にゴールした。
mm-7aは、カメラ基板とオリジナル設計のCPUを搭載したメイン基板から構成される。カメラ基板に搭載されたFPGAでは、CMOSセンサーの制御と画像データの色差画像への変換を行う。変換したデータをシリアル信号にしてメイン基板へ送信。メイン基板のFPGAでは、カメラ基板から送られてきた画像データをDDR3メモリに書き込み、CPUからDDR3にアクセスして画像処理を行い、迷路の解析を行っているという。
前回大会もほぼ同じハードウェア構成の「mm-7」で出場。そのときは西日に照らされたコースの読み取りが難しく、ゴールに到達できなかった。1年かけてソフトウェアを改良し、精度を上げ、今回は予選迷路を見事に完走。記録は19.446秒だった。残念ながら、決勝出場タイムには届かなかったが、エキシビションで決勝迷路を走った(動画3)。

初心者も、ガンバってます!! チーム「ミツキラビット」の年間活動報告
最後に初心者を代表して、連載「マイクロマウスで始める組み込み開発入門」で製作した筆者チーム「ミツキラビット」の2013年活動報告をお伝えする。
「連載が終わってもマイクロマウスにチャレンジし続けます!」と宣言した通り、ミツキラビットは2013年7月の関西地区大会を皮切りに、北は東北地区大会(山形県長井)から南は九州大会(熊本県)まで全国8地区大会に出場した。
今回は“壁切れ補正”の精度を高め、“オートスタート”“スラローム走行”にチャレンジ。9月に東日本地区大会で全走行(5回)のオートスタートに成功し、自立性が評価されて特別賞を受賞。翌10月の北陸信越地区大会では、スラロームに成功して14秒69でゴールに到達。九州地区大会では3位入賞を果たした。
しかし、全国大会は予選迷路も地区大会に比べると難しく、3回目の帰りに壁にぶつかってしまった。目標としていた「全オートスタート。最終はスラローム走行」は成功ならず。最短走行の記録は28秒638となった。
マイクロマウス競技はルールが変わらないため、ロボット開発にじっくりと時間をかけて取り組むことができる。mm-7aの山下さんのように誰も実現していない新技術に挑戦したり、ミツキラビットのように初心者が少しずつ技術を習得してレベルを上げていったりすることも可能だ。
「ロボット競技に、興味はあるけどお金も時間も掛かるから……」とちゅうちょしている方に、マイクロマウスは最適だ。機構がシンプルで部品点数も少ないため、他のロボコンに比べると開発費用も抑えられる。
第35回大会からは、マイクロマウスハーフサイズにもフレッシュマンクラスが新設。これから始めようという方は、新規参入のチャンスだ! 自身の技術力を磨くためにも、そして何よりも楽しい仲間と出会うためにも、マイクロマウスを始めてみてはいかがだろうか?
ロボット開発の最前線

Copyright © ITmedia, Inc. All Rights Reserved.