自然淘汰を生き抜いてきた地球生物を“師”と仰ぐ、ロボット研究のアプローチ:セミナー「体育会系ロボット学」より(2/2 ページ)
2013年5月21日に開催されたセミナー「体育会系ロボット学 ―人工知能、ロボット工学、レスキューシステム、エンタテインメント技術は我々の生活をどう変えるか―」の中から、京都大学 工学研究科 教授 松野文俊氏の講演「『守破離』―ロボットの運動知能―」の模様をお届けする。
“無”から学習し、成長するロボット
続いて、松野氏は「制御」と「学習」の違いについて触れ、“ロボットの知能”について紹介した。
生まれたばかりの人間は、最初何もできないが、成長・学習するにつれて、ハイハイができ、つかまり立ちができ、ヨチヨチ歩きができ、二足歩行ができ、走ることができるようになっていく。「制御というと人間がロボットに動き方をあらかじめ教え込む(プログラムする)ことになる。これに対し、学習は人間のように、ロボットが何も分からない状態から学んで・成長していくということだ。ただし、学習の場合は、“成功”に対して報酬を与える・褒めることで、それが正しいものであると、人間が教えてあげる必要がある(その逆も)」という。
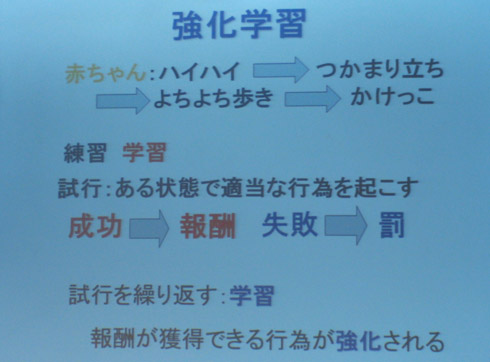
試行して(ある状態で適当な行動を起こして)、それが成功であれば褒められる。そうなると、どんどん練習を繰り返して、成否を学び、成功するための行動が強化されていく。これを「強化学習」というそうだ。「例えば、足の上げ下げしか理解していない(真っすぐ歩くことを知らない)多足ロボットが、強化学習を何度も繰り返していくと、最終的に“最適な歩行”を獲得できるようになる」(松野氏)。この多足ロボット事例は、シミュレータ上での検証だが、実際に、アクロバットロボットに鉄棒の蹴上がりの練習を何度もさせた結果、最終的に、1回前に振り出して反動を付けてから、その勢いを使って2回目で蹴上がりを成功させるというプロセスを“ロボットなりに”確立できたという。
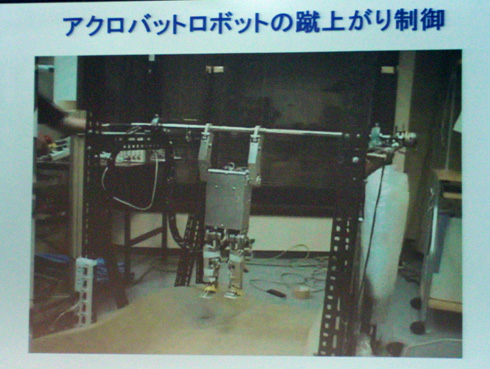
なぜ、体操選手のように1回で蹴上がりできないのか。これが何を意味しているのか……。それはつまり、強化学習を通じ、ロボットが持つそもそもの能力や環境などから、“自分に合ったやり方を自らが導き出した”ということだ。「この結果は、私も予想できなかった。これが、守破離の“破”に相当する段階かもしれない。型を守るだけではダメで、“自分の身体にあった動かし方”を身に付け、獲得していかなければならない。先ほどのロボットが2回目で蹴上がりしていたのは、強化学習により得た、そのロボットにとっての最善のやり方なのだ」(松野氏)。
「われわれ生物は、その身体に合った運動知能をどんどんと獲得していっているはず。だから、知能は脳ではなく、身体に宿る。私は、運動が全ての知能を生み出した根源だと考えている。例えば、腰を落として、重いものを持ち上げる際、『うっ!!』と声を発して力を入れることがある。これが実は音声が生まれたきっかけになったのではないかと思う。運動が基になり、声が生まれてきて、それがコミュニケーションという知的なツールに進化していったのではないだろうか」(松野氏)。
生物を超えるロボットに向けて
さて、残る“離”の段階だが、現状でその境地に立つロボットは恐らく存在しないだろう。“離”の境地に達するということは、生物の能力を完全に超えたことを意味するからだ。
松野氏は「人間をはじめとする地球上にいる全ての生物は、本当に素晴らしく、洗練された技(動き)を会得している。それは地球誕生以来、長い歴史の中で自然淘汰を繰り返しながら、生き残ってきたものだからだ。だからこそ、そうした生物から技を学び、ヒントを得て、ロボットに応用していくことに大きな意味がある。そして、こうしたアプローチを繰り返し行っていくことで、将来、生物を超えるロボットを生み出してみたい」と語る。


ロボット開発の最前線

Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
- 連載記事「次世代ロボット概論」
 ロボットと暮らす生活は、実現可能な“夢の話”
ロボットと暮らす生活は、実現可能な“夢の話”
身近な生活空間にサービスロボットがやってきたら――。キッチンやリビングで、ロボットはどのようなサービスを提供してくれるのだろうか。ロボカップ@HOMEリーグの模様を通じ、サービスロボット開発の難しさを知った。 国際安全規格から見るサービスロボット産業
国際安全規格から見るサービスロボット産業
組み込みシステム・ソフトウェアに関する各種勉強会や情報交換会、セミナーなどを通じて、教育と研究・技術開発の両面において広範囲な産学連携活動の場を提供する「組込みシステム研究会」は、新潟・長岡技術科学大学で組み込みセミナーを実施。マイクロソフトや地元長岡の組み込み関連企業、組み込み関連の業界団体が講演を行った。