トヨタ、「インフラ協調による安全運転支援システム」の公道走行実験を豊田市で実施:700MHz帯の通信インフラを活用
トヨタ自動車はインフラ協調による安全運転支援システム開発の一環として、「安全運転支援システム」の実証実験に参画。2012年3〜5月の約3カ月間、愛知県豊田市の交通事故多発交差点において公道走行実験を実施する。
トヨタ自動車は、高度道路交通システム(ITS:Intelligent Transport Systems)技術を活用し、交通事故低減を目指す「インフラ協調による安全運転支援システム(以下、インフラ協調システム)」開発の一環として、警察庁が推進し、新交通管理システム協会が主催する「安全運転支援システム(DSSS:Driving Safety Support Systems)」の実証実験に参画。2012年3〜5月の約3カ月間、愛知県豊田市の交通事故多発交差点において公道走行実験を実施すると発表した(補足)。
今回、公道走行実験を行うシステムは、従来の光ビーコンを通じて所定のポイントで情報提供されるシステムを進化させたもので、総務省より2011年12月にITS向け周波数として割り当てられた700MHz帯の電波を利用する。無線通信方式は2月に電波産業会で策定された700MHz帯高度道路交通システム標準規格「ARIB STD-T109」を用いる。
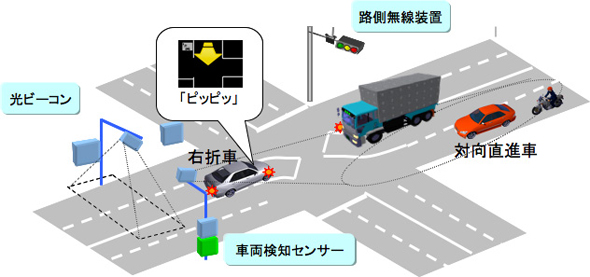
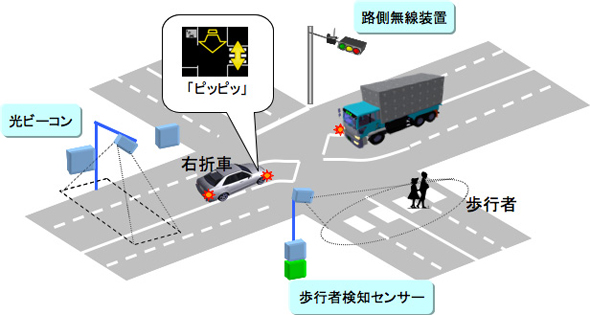
車両に搭載したセンサーだけでは、右折車の死角に入った対向直進車や横断中の歩行者の検出が難しく、未然に事故を防止することは困難である。今回の公道走行実験では路側のセンサーと無線装置を活用し、「右折時衝突防止支援システム」と「歩行者横断見落とし防止支援システム」を実現する。
システムの概要は以下の通りだ。路側に車両検知センサーおよび歩行者検知センサーを新設置し、その情報を同じく路側に新設した無線装置の700MHz帯電波を用いて車両側に送信する。それを実験用車載システムで受信して、音やディスプレイによる表示で運転者に注意を促すことで、交差点事故の主な原因となっている認知ミスの防止に役立てる。
実験車両は同社社員の通勤車両など40台を計画。2012年後半には対象者を一般にまで拡大した実験を予定しているとのこと。
同社は今回の公道走行実験を「2018年までに交通事故死者数2500人以下」という政府目標の実現に向けた取り組みの1つとして位置付け、さまざまな状況下での運転者の行動データを収集・分析することで、インフラ協調システムによる事故低減効果を予測し、同システムの開発に生かすとする。また、今後は、音声やディスプレイによる情報提供に加え、運転者への警報や車両の減速・停止といった「インフラ協調による介入制御」などへの発展を視野に入れたシステム開発につなげていく計画だという。
Copyright © ITmedia, Inc. All Rights Reserved.
 スマホと車載機器をつなぐ「MirrorLink」対応システムを開発、仏ヴァレオ
スマホと車載機器をつなぐ「MirrorLink」対応システムを開発、仏ヴァレオ 「ロボット技術で安全と環境の問題を解決したい」〜ロボットカーに挑戦するZMPの狙い(後編)
「ロボット技術で安全と環境の問題を解決したい」〜ロボットカーに挑戦するZMPの狙い(後編)