「協力しないかと言われたら『Why not?』ですよ」〜月面レースに挑む研究者、東北大・吉田教授(後編):再検証「ロボット大国・日本」(5)(1/2 ページ)
東北大学・吉田和哉教授へのインタビュー【後編】。前回の「超小型衛星」に続き、今回は民間初となる月面無人探査コンテスト「Google Lunar X PRIZE」への挑戦、そして「月面ローバー」の開発について紹介する。
東北大学・吉田和哉教授へのインタビュー【後編】として、今回は民間初となる月面無人探査コンテスト「Google Lunar X PRIZE」への挑戦、そして「月面ローバー」の開発について紹介する。
なお、「超小型衛星」に関しては、前回の記事を参照してほしい。
月面レース「Google Lunar X PRIZE」とは?
アポロ11号によって、人類が初めて月に足跡を残したのは1969年7月のこと。以来、40年以上が経過したが、これまで月面に降り立てた人間は米国人の宇宙飛行士12人のみである。しかも最後はアポロ17号の1972年で、それ以来、人類は月から遠ざかっている。――月は人類にとって、近くて遠い存在なのだ。
しかしここにきて、日本の「かぐや」、中国の「嫦娥(じょうが)」、インドの「チャンドラヤーン」、米国の「LRO(Lunar Reconnaissance Orbiter)」などが相次いで月を探査し、再び月に注目が集まりつつある。月面基地建設のための調査であったり、資源探査であったり、科学研究であったりと、その動機はさまざまだが、これらは全て国家の宇宙機関による探査だ。民間利用が進む地球周回軌道と違い、月惑星探査は依然として「国のもの」である。

この状態に風穴を開けよういう試みが「Google Lunar X PRIZE」である。民間資金で探査機を開発し、打ち上げて、月面から映像を送る――これを最初に達成できたチームに2000万ドル(1ドル=80円換算で16億円)の賞金を贈るというもの。水を発見した場合などに与えられるボーナスもあり、賞金総額は3000万ドルにもなる。スポンサーになっているのはあの米Google社だ。
| 関連リンク: | |
|---|---|
| ⇒ | Google Lunar X PRIZE |
これを実施しているX PRIZE財団は以前、民間宇宙機開発にも懸賞金を出し(Ansari X PRIZE)、実際、米Scaled Composites社の「スペースシップワン」は2004年に高度100km以上の弾道飛行に成功して、「有人宇宙機は国のもの」という現状に風穴を開けた。遅かれ早かれ実現してはいただろうが、こういった懸賞金の存在によって開発が加速したのは間違いないだろう。航空機の時代の到来を告げたリンドバーグの大西洋無着陸飛行にも懸賞金があった。競争を過熱させ、資金を集め、世界を変える――これがX PRIZE財団の狙いだ。
現在、Google Lunar X PRIZEに参加しているのは世界各国の28チーム(リタイア済みのチームは除く)。米国からの参加チームが多いが、日本で唯一、これに関わっているのが東北大学の吉田和哉教授だ。欧州との混成チーム「White Label Space(以下、WLS)」の一員として、月面ローバーの開発を担当している。
White Label Spaceのランダー/ローバー
Google Lunar X PRIZEで与えられた課題は以下の通りだ。
- 月面に着陸すること
- ランダー(着陸機)か搭載ローバーが最低500m以上移動すること
- 着陸後と移動後に画像を送ること(8分以上の動画を含む)
WLSでは、ランダーを欧州チームが、ローバーを日本チームが担当している。下のイラストのように、ローバーはランダーの上に搭載されており、着陸後にスロープを使って月面に降りる仕組みになっている。

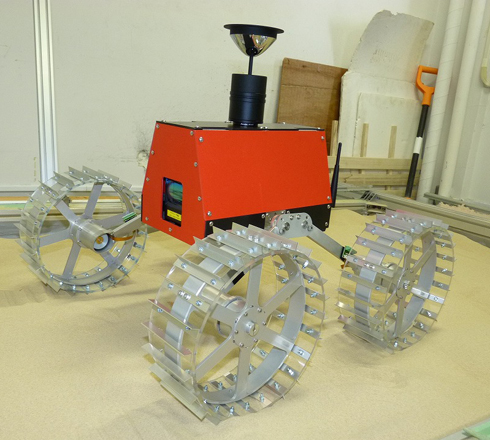
搭載スペースに制約があるため、ローバーはあまり大きくはできないが、移動能力を考えれば大きい方が有利である。そこで、このローバーでは搭載時には畳んでコンパクトになり、月面で展開して大きくなるコンセプトを採用した。車輪は20cm径で、秒速1cm程度で月面を走行するのが目標。ステアリングはないが、左右の車輪の速度を変えることで任意の方向に曲がることができる。
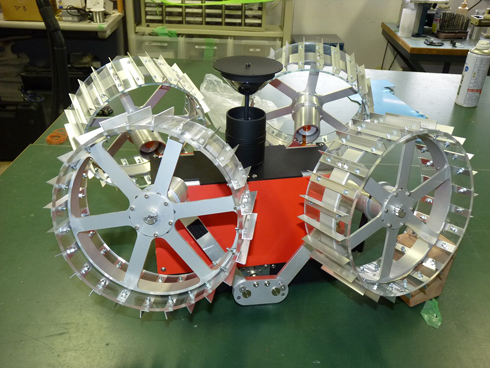
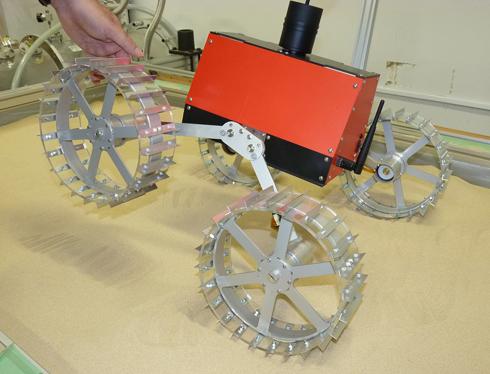
移動方式としてはクローラも考えられたが、クローラだとレゴリス(月面の細かな砂)をかんで動かなくなることがあって、小さく作るのが難しいのだという。今回、ローバーに与えられた重量はわずか10kg。クローラの代わりに車輪方式を採用し、なるべく車輪を大きくすることで、クローラに匹敵する移動能力を実現する。
センサーは、ボディの前方にレーザーレンジファインダー(LRF)を搭載。これで前方を広くスキャンして、地形の3次元形状を把握する。また、上部に飛び出す形で搭載されているのは全方位カメラだ。これで月面を撮影して、ランダー経由でデータを地球に送信する。移動については、地上から人間が目的地を指示するが、障害物の回避などはローバーが自律的に判断して行動することが可能だ。
衛星とローバーでは見た目が大きく異なるが、機能的にはどちらも「ロボット」である。実際、内部のアーキテクチャは「雷神」に近く、制御はFPGAがベースとなっている。吉田教授によると「雷神に足が生えた感じ」なのだとか。超小型衛星と共通する要素も多く、「雷神シリーズで開発した技術や部品が使えるということがわれわれの強み」(吉田教授)となっている。
過酷な月面環境をどう乗り切るか
宇宙は地上とは全く異なる環境であるため、地上のロボットをそのまま持って行ってもうまく動かない。設計に考慮すべき要素としては、「重力」「真空」「放射線」「温度」「レゴリス」などがあるが、一口に「宇宙」といってもこれらの条件は目的地によっても異なるので、周回軌道なのか、月なのか、火星なのか、ミッションごとに最適化する必要がある。

各要素について、ここでは詳しくは述べないが、月面の環境で特殊なのは、1日が長いことだ。月は常に同じ面を地球に向けているため、地球を1周してやっと月自身も1回転している。“月面での1日”は地上の4週間に相当しており、“2週間の昼”と“2週間の夜”が交互に訪れることになる。
大気がない月面では、昼は100℃を超える灼熱に、夜は−100℃を下回る極寒になる。長い夜間には、太陽電池が使えないという問題もあり、越夜のためには、機器を温めるヒーターとバッテリーが必要となる。難易度が高いために、Google Lunar X PRIZEではチャレンジングな課題として、越夜にもボーナスがかけられている。
しかし、WLSローバーの10kgという重量制限でこれは現実的ではないため、越夜はスッパリと諦める。温度条件が一番マイルドな「朝」の地点に着陸して、熱くなる「昼」の前にローバーを走らせる。順調にいけば、500mくらいは半日程度で完走できるはずだ。WLSローバーは小型のため熱容量が小さく、炙られると比較的短時間で高温になってしまう。朝から昼までの1週間、これが勝負だ。
Copyright © ITmedia, Inc. All Rights Reserved.