静特性を取るか、動特性を取るか。それが問題や:独学! 機械設計者のための自動制御入門(11)(3/4 ページ)
直線走行だけではなく、車線変更や交差点での右折、左折もある。車が車線変更するときの応答性の制御について解説。
いま明かされる!! 本当の真実
そういうこっちゃ。……次は車体の伝達関数GBについてや。
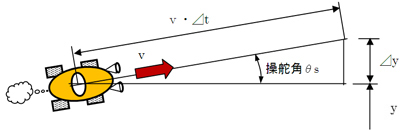
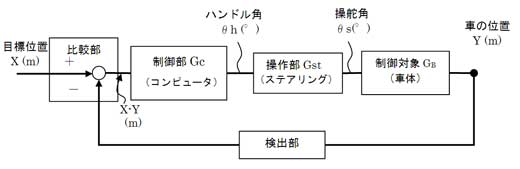
車体の伝達関数GBは、第4回の図7の絵で説明してくれたよね。Δt時間あたりの車体の横方向の移動量Δyはv・Δt・θsだから、総移動量yはタイヤの操舵角θsの時間積分で表現されるって。つまり車体の伝達関数GBの入力はタイヤの操舵角θsで、出力は車体の移動量yだとした。図3でもGBの入力は操舵角θsとなっているよね。でもね……図7の操舵角θsは、車体の旋回角θBの間違いじゃないの?
何でそう思うんや?
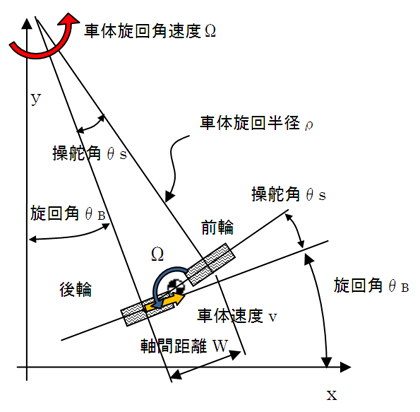
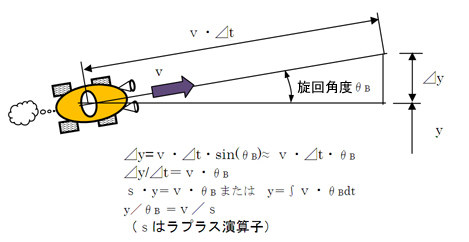
図8は、タイヤの操舵角θsと車体の旋回角θBの関係を図示したものだけど、図7と図8を比べれば分かるように、図7でいう操舵角θsは、本当は車体の旋回角度θBのことだと思うんだ……操舵角θsは前輪タイヤの回転角度であって、車が進む方向を示すものではないよ……つまり、図7は間違いで、図9が正しいと思うんだ。
おう、鋭い!
ますます鋭い。もう草太には分かっていると思うけど、車体の伝達特性は2つの部分から構成されている。1つは草太が今説明してくれた、伝達関数GθB/θs=車体旋回角θB/操舵角θsで表現される特性。もう1つは、車体の旋回角度を入力、車体の横方向位置を出力とする伝達関数Gy/θB=車体移動量y/車体旋回角θBで、図9はこの伝達特性を意味している。
すると、本当の自動走行制御システムのブロック線図は図10のようになるんだ。
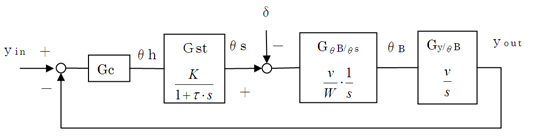
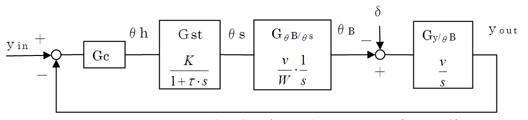
ちょっとちゃうな。強風を受けて車が曲がるのは車体が風を受けて旋回角度θBが変化するからや。だから図11が正しいブロック図なんや。それで……草太の言うことは正しい。正しいけども……けどもや……。実は、図11のブロック線図ではうまく制御できひんのや。
なぜかな……?
草太はその理由を考えてみました。
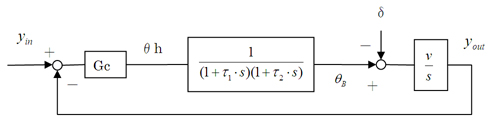
図11の開ループの伝達関数は
ですから、積分が2つ含まれています。すると、コントローラーの伝達関数Gcを除いた位相遅れは、ステアリングの一次遅れ特性を含めれば180°以上あることになります。つまり位相余裕は必ず負となります。従って、図11は本来的に不安定なフィードバックシステムです。よって制御器Gcでいくら位相補償をしても改善は期待できません。
そういうこっちゃねん。こういう場合は、図12のように内部ループを作ることで、安定化を図ることができるねん。
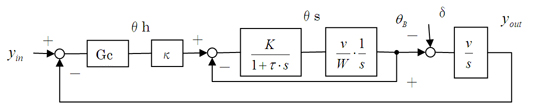
車体の旋回角度θBを検知して制御器Gcの出力側にフィードバックするので、制御器Gcは内部ループに対して車体旋回角θBを目標値として出力することになるんや。つまり内部ループの伝達関数は……。
……となって、2次遅れとなる。κ=1として、この2次式が因数分解できるとすれば、図12のブロック線図は図13のようになるねん。
いままで、強風が吹いている状態で、車を直進させるための制御ブロック図を図14のように描いてきましたが、正しくは図15のようになるわけです。
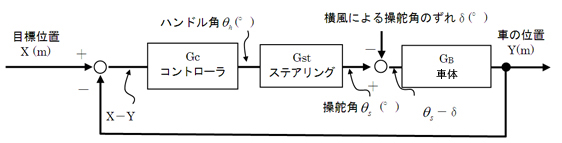
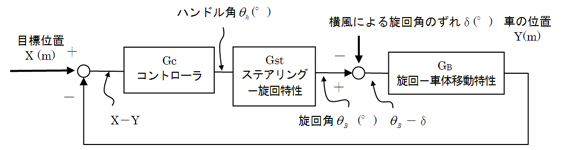
強風によって、操舵角つまりタイヤの向きが変わるのではなく、車体の旋回角度が変わる、というのが正しい考え方です。また、制御部からステアリングに渡される指令は、目標操舵角ではなく、車体旋回角であることも、図13の制御イメージとは異なります。従って、図12から分かるように、このシステムには車体の旋回角度を検知するシステムが搭載されているということになります。
Copyright © ITmedia, Inc. All Rights Reserved.