Cで行う二輪倒立振子とライントレースの制御:ETロボコン2009、挑戦記(3)(2/2 ページ)
前回に引き続き、ETロボコン事務局から提供されているプログラムを実行。うまく行けば倒立振子とライントレースを行います。
さらに正確なセンサ値を得るために
昨年取材していた際に何名かの参加者の方が「普段練習している環境と、実際にレースを行う会場との光度が違うので、うまく走行できない場合がある」といっていたのですが、今回実際に参加してみて、そのことがよく分かりました。例えば、先ほどラインを外れたときのセンサ値が約540でしたが、自宅で走行した際には600近い値でした。これでは同じプログラムを実行してもNXTはうまく走行してくれません。
NXTは構造上、RCX(昨年までメインで使用されていた走行体)よりも、環境に左右にくいような光センサになっていますが、それでも、より本番に近い環境でセンサ値を得る必要がありそうです。
(案1)LED点灯時のセンサ値を得る
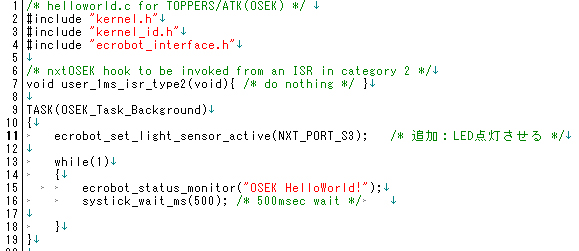
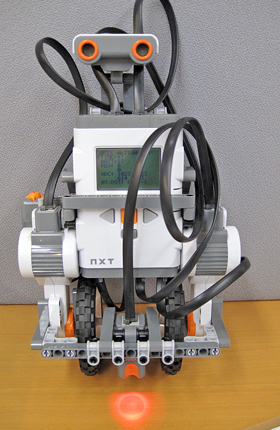
まずは、走行時に点灯していたLEDを、helloworldプログラム実行時にも点灯するように書き換えます(さきほど走行していたときにはLEDが点灯していました)。
LEDの点灯は、ecrobot_set_light_sensor_active(NXT_PORT_S3);というAPIが用意されていますので、これを上記のソースコードに書き加えます。すると、LEDが点灯しました。これでより走行時に近いセンサ値を得られるようになります。
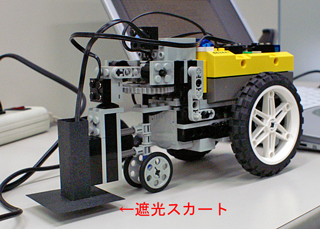
(案2)光センサの周りに遮光スカートを付ける
もう1つの方法は、RCXのときに多くの参加者の方が付けていた遮光スカート(センサの周りにまくもの)を使用することです。
遮光スカートを付けることで、万が一斜め横や反射されてきた光が入ってきても、遮断することができます。昨年の取材時にチーム「すねいる」さんがとてもきれいな遮光スカートを付けていましたので、それを参考にすると良いかもしれません。
| 関連リンク: | |
|---|---|
| ⇒ | 連載記事「ETロボコン2008〜チャンピオンシップへの道〜」 |
さて次回はついにETロボコンの核心部分である、モデルの作成に入ります。5〜6月にかけて行われた参加者向けの技術説明会の内容も踏まえ、組み込みシステム開発におけるモデリングの手法について1から学んでいきたいと思います。
Copyright © ITmedia, Inc. All Rights Reserved.